Kinematics of an Umbrella in ASOMmini
This example video shows how a typical umbrella can be modeled and analyzed kinematically in ASOMmini.

This example video shows how a typical umbrella can be modeled and analyzed kinematically in ASOMmini.
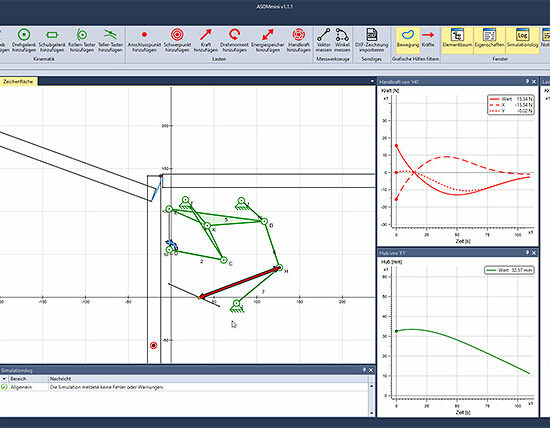
This example shows that the force conditions for a six-bar hinge mechanism on the flap door of a kitchen cabinet (see last video) can also be checked quickly and easily with the kinematics software ASOMmini.

Use the new manual force element in ASOMmini (version 1.1 and higher) to see in real time how the necessary manual force to drive your system with its pre-defined motion profile develops while changes are made.
In the fifth and last part of our series, we will look at the isosceles linkages: isosceles double-crank, isosceles crank-rocker and the rhombus-crank.
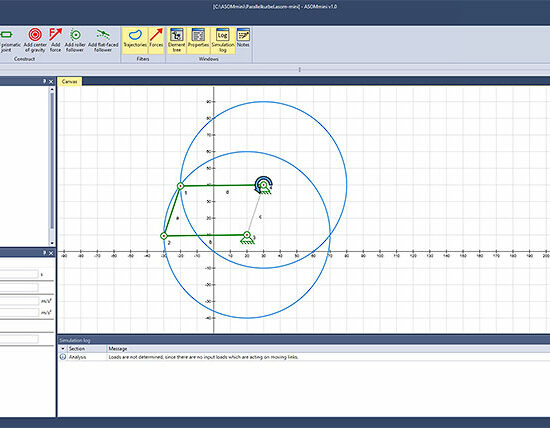
In the fourth part of our series, we will cover the parallel-crank and antiparallel-crank.
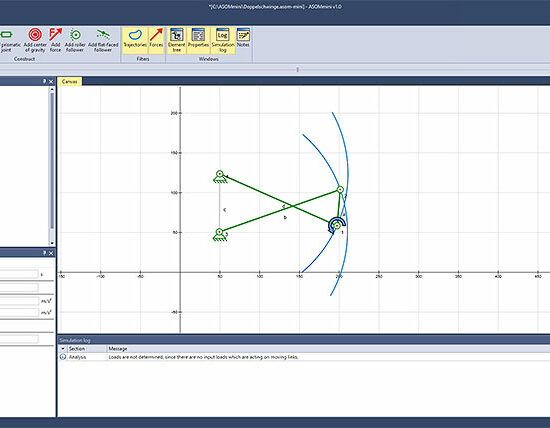
In this third part of our series, we will discuss the double-rocker. In this type of four-bar linkage, both grounded links are not able to revolve fully.
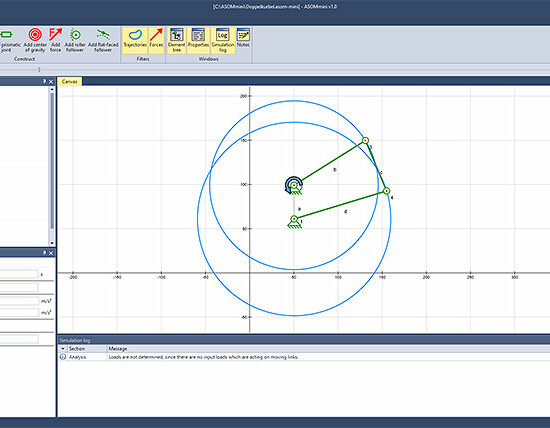
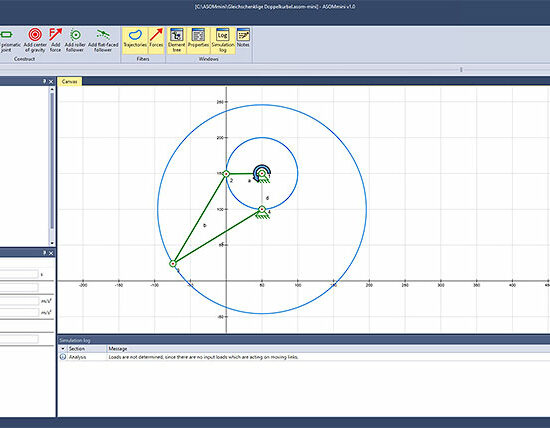
We continue our video series with the double-crank. In contrast to the crank-rocker, in a double-crank mechanism both grounded links can revolve fully, which is where its name comes from.

The first part of our video series features the crank-rocker. In a crank-rocker mechanism, one grounded link is able to revolve fully while the other one is not.
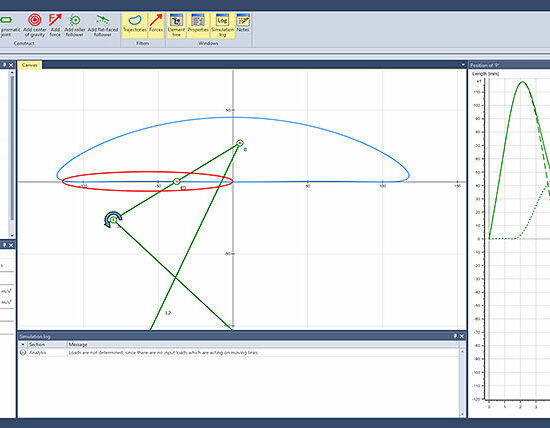
In the following video, an approximate straight-line mechanism based on Chebyshev is constructed and animated.

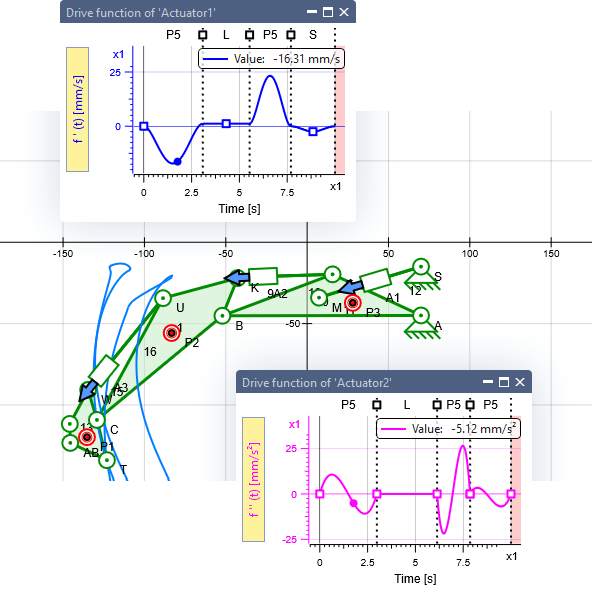
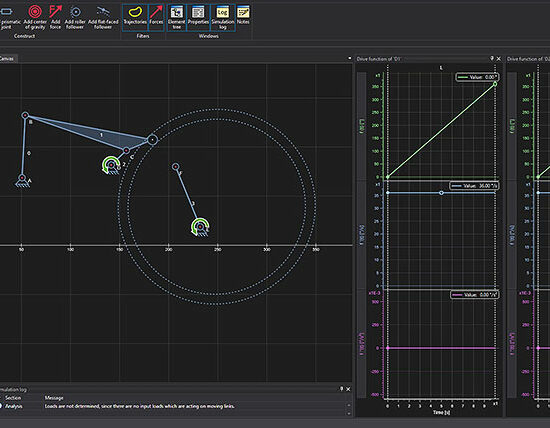
Creation of a simple kinematic system and modification of its drive function with the mechanism software ASOMmini.
In this example, a four-bar linkage and a one-bar linkage including their motion sequences are given. These can be connected in ASOMmini with a roller follower.

In this example, an excavator arm is animated as a planar mechanism.

The example shows an arbitrary multi-bar linkage with various rotary joints and sliding joints.

Animation of a six-bar linkage with the kinematics software ASOMmini.
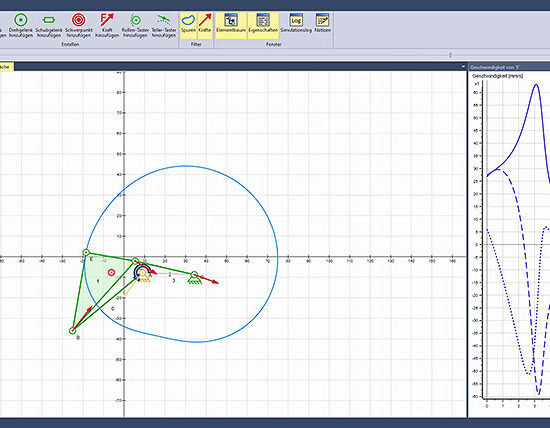
Creation of a simple planar mechanism, using the kinematics software ASOMmini.