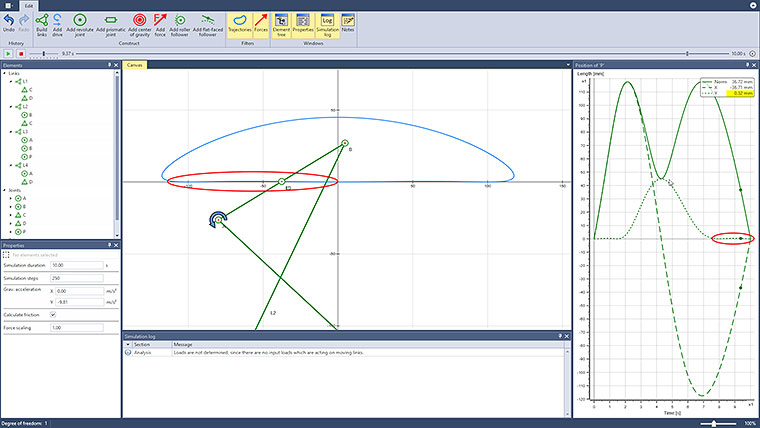
In the example, a one-bar linkage is created and the drive movement is modified with the help of the interactive diagrams so that it moves as a rocker arm.
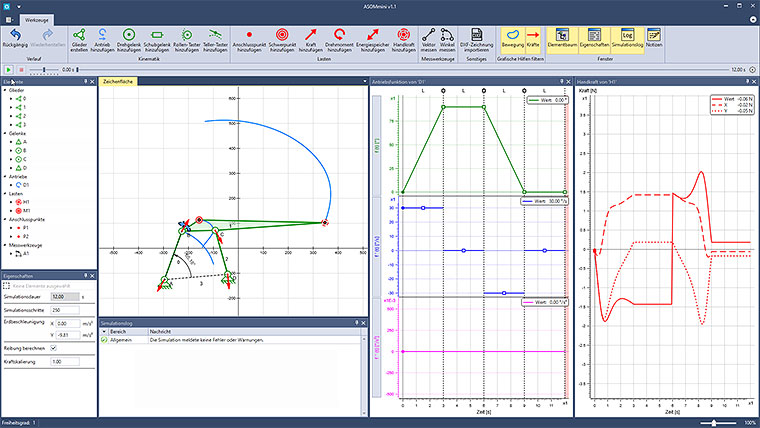
Modifications to the motion sequence can be made directly in the drive angle graph. Alternatively, this can also be done on the graph for angular velocity and / or on the graph for angular acceleration.
The drive function can be divided into segments. Different characteristics can be assigned to each segment (straight line, sinusoidal, trapezoidal function, polynomial of 5th degree) and the transition from segment to segment can be specified and varied in this way.