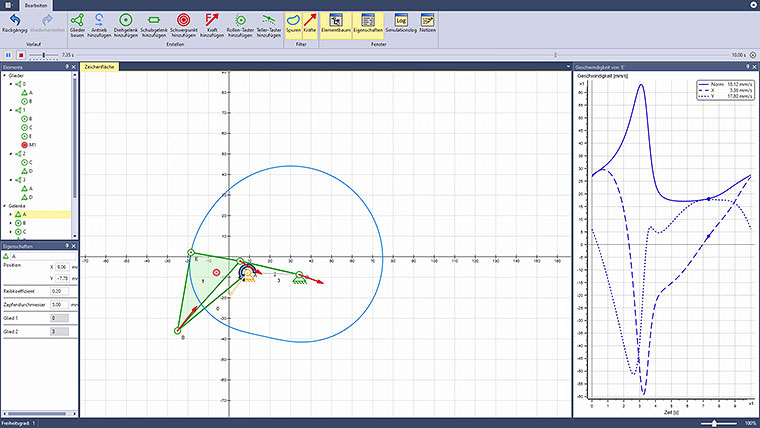
Ein Beispiel zum Verhalten einer Kinematik Simulation, hier einer interaktiven kinematischen Drei-Lagen-Synthese zu einem Viergelenksystem in ASOMv7.
Die Positionen sind durch Marker vorgegeben, die vom Anwender beim Erstellen der Synthese einfach per Fangen abgegriffen werden. Die entsprechende Umpositionierung der kinematischen Gelenkpunkte erfolgt dann durch ASOM automatisch und unmittelbar.
Der Anwender hat auch nach Fertigstellung der Synthese die Freiheit, einzelne Gelenkpunkte zu repositionieren. ASOM übernimmt auch dann wieder die Umpositionierung der verbleibenden Gelenkpunkte in Echtzeit, um die Anforderungen der Synthese an den Mechanismus (nämlich die erwünschten drei Ebenen exakt zu durchlaufen) weiterhin zu erfüllen.