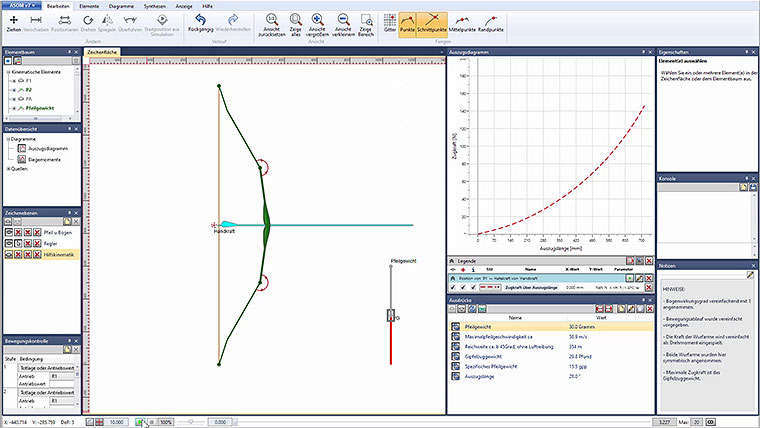
An example for the behavior of a kinematics simulation, in this case an interactive three position synthesis for a four-bar linkage in ASOM v7.
The positions are visualized by predefined markers, the user just catches these when entering the synthesis conditions. The corresponding repositioning of the joints of the kinematic system is carried out automatically and immediately by ASOM.
Even after finishing the synthesis, the user has the freedom to reposition individual joints. Once again, ASOM takes care of the repositioning of the other joints in real time, to keep the requirements (i.e. to run exactly through the three desired orientations) of the synthesis satisfied.