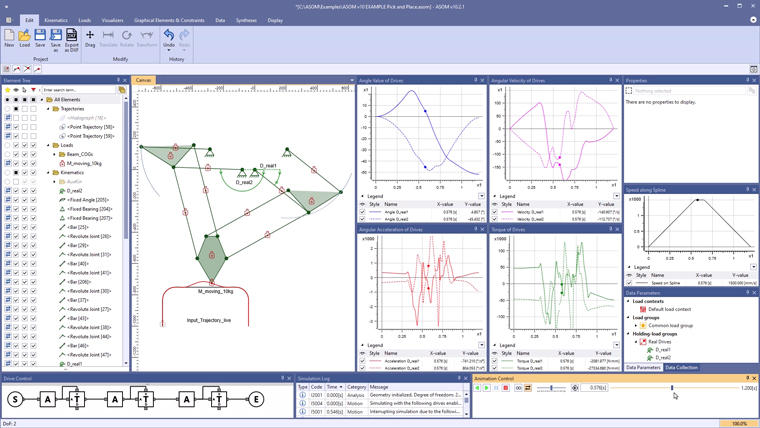
An den Orten der realen Antriebe sitzen deaktivierte Antriebselemente und messen die nötigen Antriebsprofile (Winkel über Zeit, Winkelgeschwindigkeit, Winkelbeschleunigung, nötiges Drehmoment). So kann in den meisten Fällen auch eine Invers-Kinematik in ASOM gerechnet werden (Bewegungskurve als Input, Antriebswerte als Output).
Das System ist geeignet bemaßt, so dass seine nötigen Parallelitäten bzw. Symmetrien bei allen Änderungen erhalten bleiben und sich der Mechanismus automatisch an neue Gelenk- oder Schwerpunkt-Positionen anpasst. Die Bewegungskurve (hier in rot) ist als Spline implementiert und kann ebenso live geändert werden.
Das Geschwindigkeitsprofil ist hier ein Geschwindigkeitstrapez, das über die Antriebssteuerung in drei Abschnitten erzeugt wird (Beschleunigung, Konstantfahrt, Abbremsen). Alle kinematischen Glieder sind mit Massen und Trägheitsmomenten ausgestattet, so dass auch Trägheitseffekte bei der Berechnung der Drehmomente berücksichtigt werden.