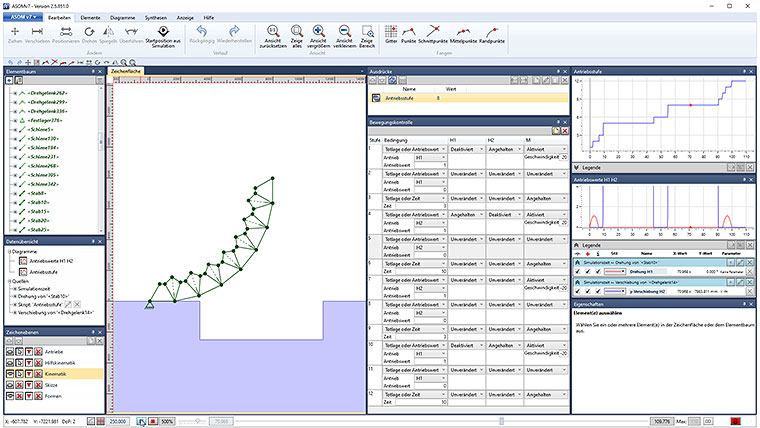
In reality, the rolling bridge is not always kinematically fully determined in the same way. Rather, in contact with the environment, it is fully determined successively in different ways. Where its degrees of freedom are, therefore, changes with time. This is modeled here by auxiliary drives switching back and forth between locked and deactivated state. In the motion control, rules are used to define what is to occur in which order and what way.
With the help of script functions, expressions and diagrams can then be used to illustrate which stage of the motion control is currently active during the simulation.
The hydraulic drives were simulated in such a way that one main drive transmits its movement (or change in length) uniformly to all prismatic joint rails via multiple travel connections in series.
Entry for the “real” rolling bridge on Wikipedia: https://en.wikipedia.org/wiki/The_Rolling_Bridge