Kinematics of a hospital bed in ASOM
Hospital beds are equipped with two essential drives: one for adjusting the height of the entire bed and another for tilting the foot section. In reality, such systems often use spindle drives.
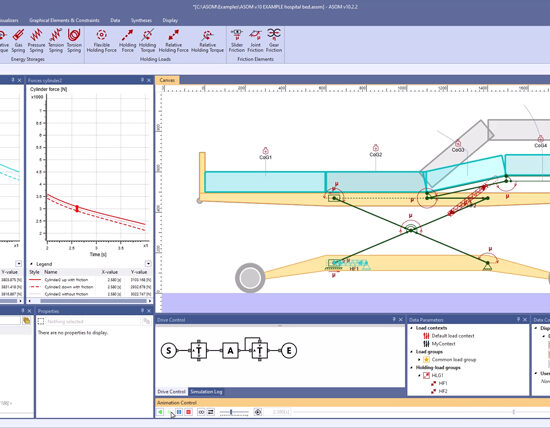
Hospital beds are equipped with two essential drives: one for adjusting the height of the entire bed and another for tilting the foot section. In reality, such systems often use spindle drives.
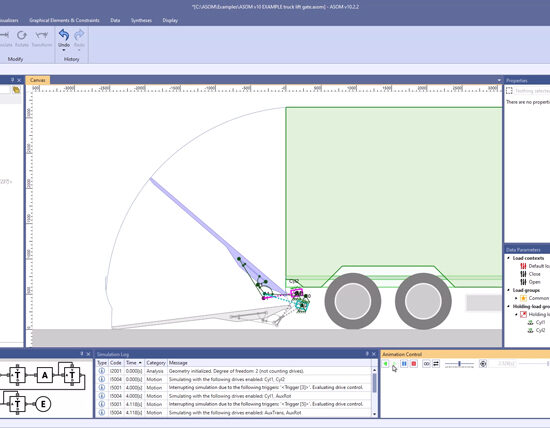
The example shows a conceptual kinematic design for a truck tailgate lift or lift gate, as a linkage (degrees of freedom =2), driven by two hydraulic cylinders.
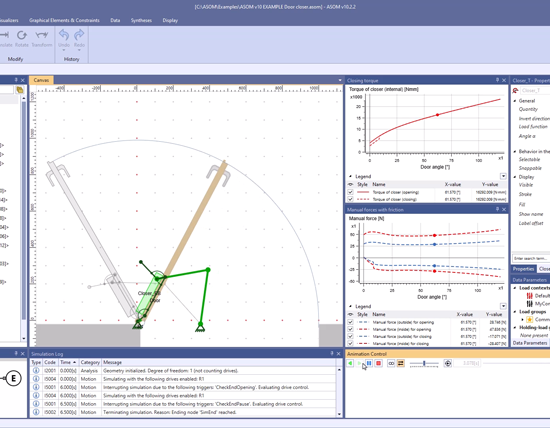
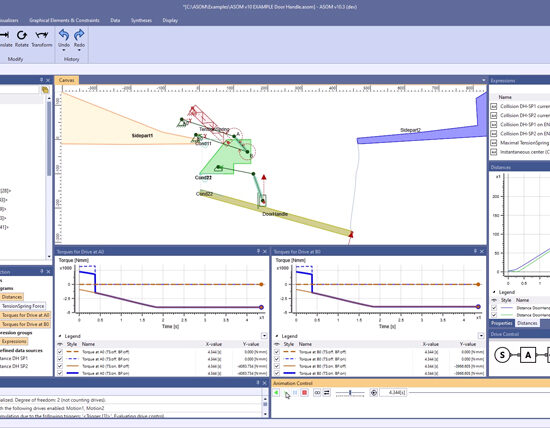
The example shows the externally visible components of a door closing system and the associated forces when the door is operated manually.
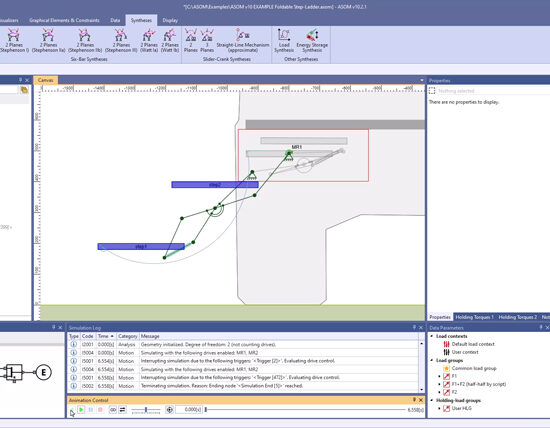
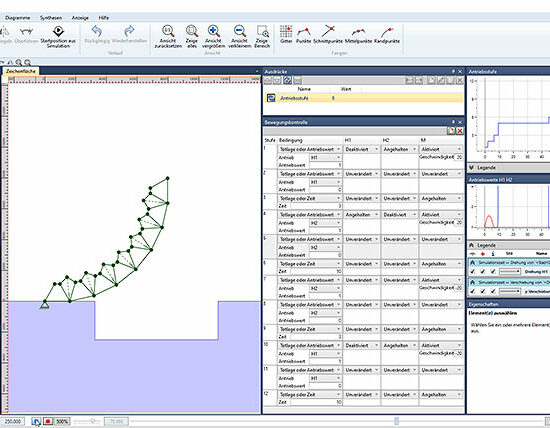
Using the example of a two-step folding ladder for a mobile home, it is shown how two systems can be organized in different folders in the element tree for the purpose of a direct comparison.
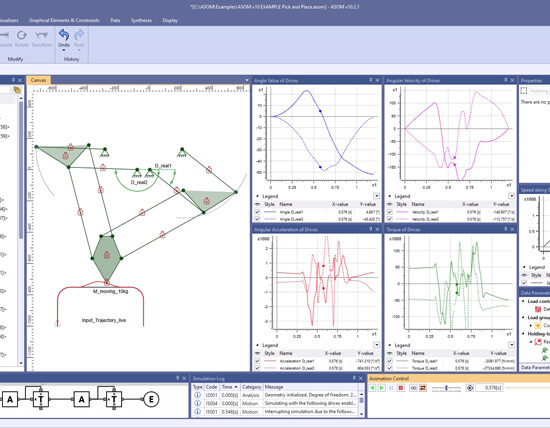
Example of a generic parallel pick-and-place mechanism in ASOM v10 with two degrees of freedom. The model is set up in such a way that its drive sits on the specified curve and drives the definition point over the curve ...
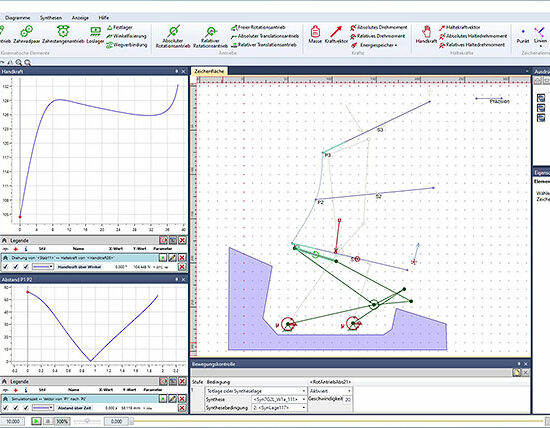
Example for the design of a mechanism for a flush-mounted retractable door handle with separate kinematic syntheses for the two partial systems (two syntheses “in series”).
In this example of a four-bar linkage, multiple manual force curves are determined in real time. The concept can of course also be applied to any other type of multi-bar linkage. The kinematic analysis can also be extended, e.g. to ...
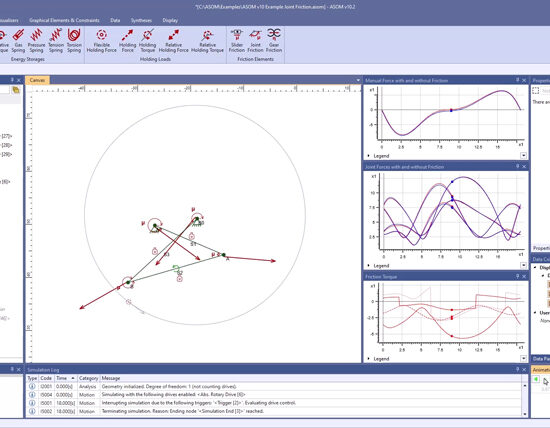
This example shows how to implement joint friction for revolute joints in kinematic models in ASOM. With the aid of joint friction elements, a pin diameter and a friction coefficient can be managed for each revolute joint.
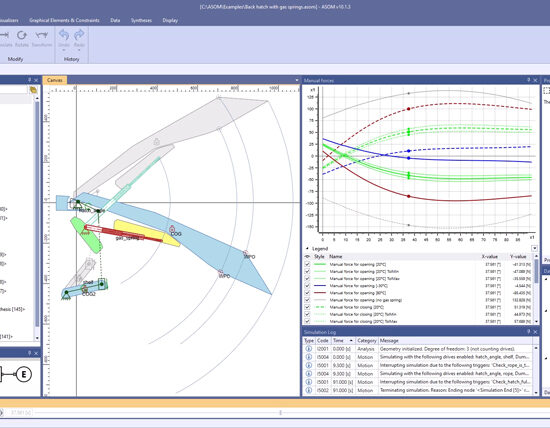
In this example, the ASOM v10 kinematics software simulates a back hatch with gas spring support that has a hat shelf as an additional feature.

In this video the example of a typical umbrella is used to demonstrate how to purposefully create variations of a kinematic system in ASOM v7 in order to find better solutions.
This video shows how complex sequences of motions can be created and analyzed with the kinematics software ASOM v7 using the example of a rolling bridge.
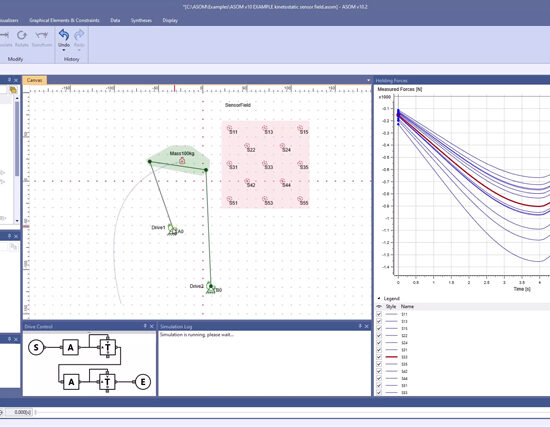
In cases where a third plane condition is not offered by a synthesis, you can, for example, alternatively use our script system together with diagrams, to check in real time how well a middle plane condition is met.

Use the new manual force element in ASOMmini (version 1.1 and higher) to see in real time how the necessary manual force to drive your system with its pre-defined motion profile develops while changes are made.

The example shows an arbitrary multi-bar linkage with various rotary joints and sliding joints.
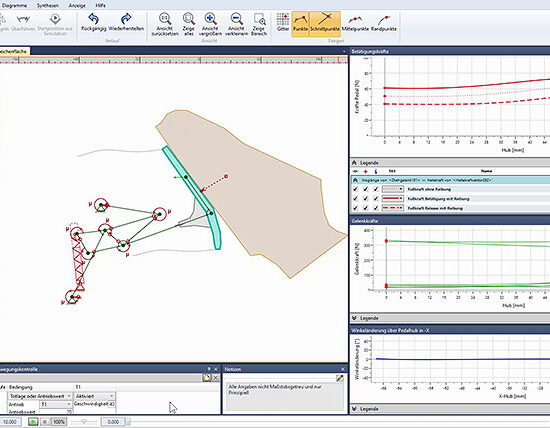
The example shows a pedal system and the corresponding motions of its kinematics in the kinematics software ASOM v7.