ASOM v7 - the comprehensive solution for professionals
You need to design a completely new linkage? Or modify or optimize an existing one? With the kinematics software ASOM v7 you can get optimized concept results in the shortest possible time.
Overview of the most important functions of ASOM v7
Save time and nerves when dealing with complex problems
Engineers are well aware that kinematic problems can be very time-consuming.The slightest changes can quickly cause your entire concept to spiral out of control. If forces, mounting zones, and other restrictions also have to be taken into account, it can often take months to find a viable solution. ASOM, on the other hand, has adopted the strategy of automatically maintain various partial aspects of a solution in order to reduce the complexity of the problem as much as possible for you.
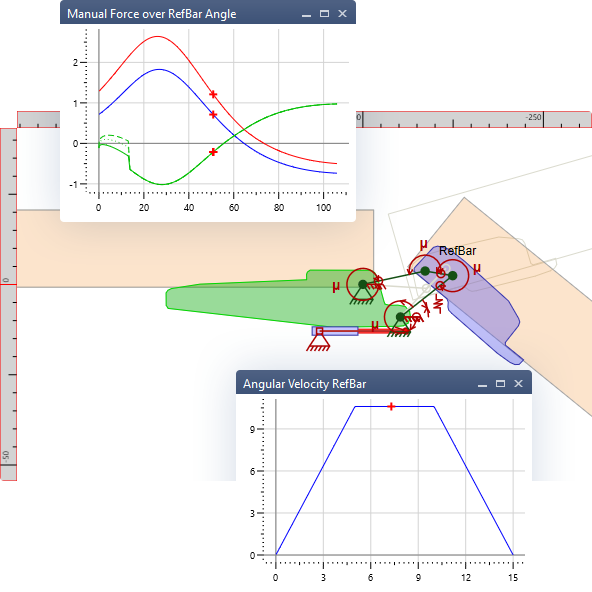
Visual results in real time - or even faster
See how your measured parameters, your secondary constraints, your graphs, and previews for your system's final state or intermediate positions respond to your inputs in real time. The effect of every change you make is computed, simulated and visualized in real time. This makes the development process immediately tangible and intuitively understandable, and allows you to quickly test out entire parameter ranges or mounting zones. Understand quickly and interactively what possibilities your system has - or does not have - and act accordingly.

Create realistic presentations quickly and intuitively
You can import DXF files or images to include sketches of your components in the simulation. This way, you can easily include mounting zones and surrounding structures or attach corresponding sketches to moving components to give them realistic shapes. If only simple shapes are required, you can also use our graphical elements to add shapes. This will allow you to quickly get a detail-rich simulation to present your solution.
Do you already know our training courses?
We offer different training options, both on site and online, so that you can use the full range of functions of our kinematics software ASOM.
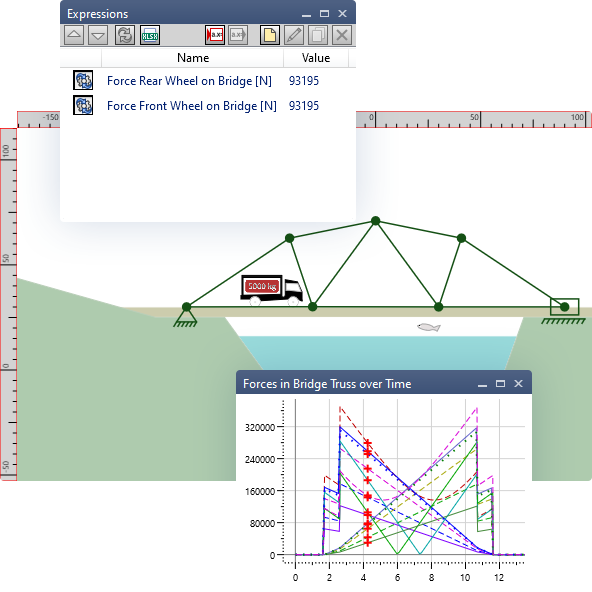
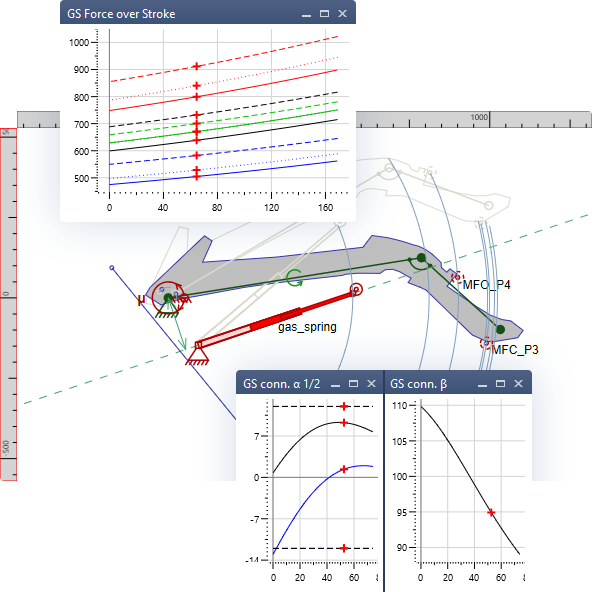
Calculate forces any way you want - even parallel scenarios in comparison
Use our force calculation and the related tools to enter known forces and let ASOM determine the unknown forces. You just have to specify where and how an unknown force should act. Compare alternative force scenarios and/or different environmental conditions in the same project, or even in the same diagram. In addition to that, we also support both constant and joint force-dependent friction in joints, as well as inertia effects on elements with mass and tolerances in force elements.

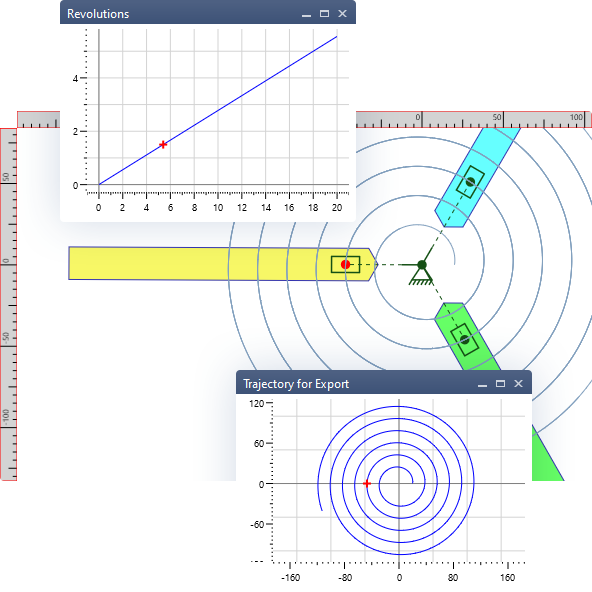
All kinematic building blocks, at any time, at the push of a button
Use the full range of 2D kinematics for your simulation: gear pairs, belt drives, racks, spline rails (curved guides), conditions for rolling connections of any two contours (“travel connection”) and more. You can use all these components or kinematic conditions in ASOM and simulate resulting linkages of any complexity with any degree of freedom.
Get in contact
Request an online presentation of ASOM – completely without obligation.
Net meeting
In an online meeting, we demonstrate ASOM to you and answer your questions.
Evaluate
If you order our basic training course, you can then try out ASOM for free for three months.
Purchase license
After the evaluation phase, you decide whether you want to purchase a license or not.
With your know-how, ASOM becomes even more effective
If the options we provide are not sufficient for you, you can in many cases add the required functionality yourself. With our scripting system, which has access to all simulation data, you often don't have to wait for us to add new functionality for you. Even the behaviour of force elements can be almost completely scripted, if necessary. Thus, you are not limited by the building blocks we currently offer.

Various interfaces for import and export
Apart from the already mentioned import function for DXF files and images, we also offer the option of exporting and importing the finished geometries, as well as individual polygons and/or curved guides. Likewise, any diagram data can be exported. Calculated values form expressions can be linked to an Excel file in order to export all important values there at the push of a button, e.g. for documentation purposes. There is also a COM interface for general data exchange with external programs.
ASOM v7 is exactly what you have been looking for? We look forward to hearing from you.
Just contact us, without any obligation, so that we can get to know each other and discuss details at an initial net meeting. We will also be happy to address your individual requirements and to resolve any open questions.
