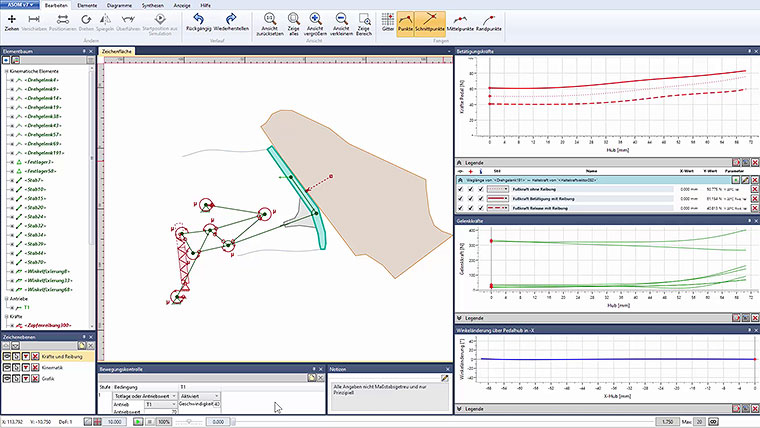
In a diagram, the angle change of the foot is plotted over the stroke of the spring. In further diagrams, the joint forces and the necessary actuating forces are determined. An energy storage is taken into account, in this case a tension spring. Also, the joint friction present in the joints is taken into account as a force-dependent sliding friction by means of a sliding friction coefficient.
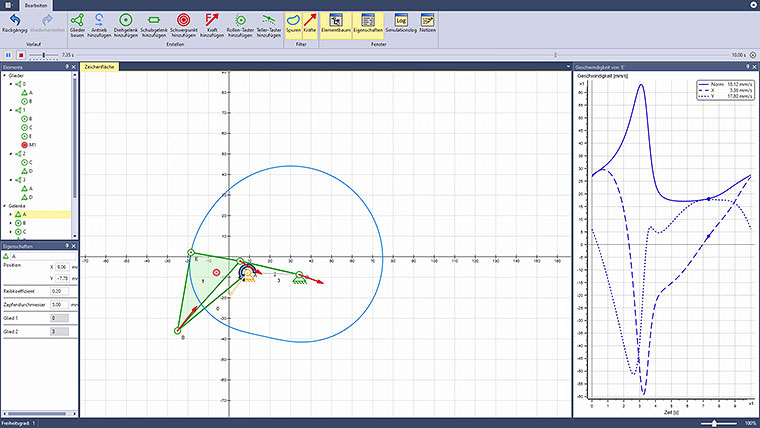
Whenever something is changed, be it the position of the energy storage or the bearing positions, all results are immediately and without delay determined in real time or rather compressed time.