Kinematik eines flächenbündigen Türgriffs
Beispiel für die Berechnung einer Kinematik zu einem flächenbündigen, einziehbaren Türgriff mit separaten Synthesen für die zwei Teil-Kinematiken („Reihenschaltung“ von zwei Synthesen).

Beispiel für die Berechnung einer Kinematik zu einem flächenbündigen, einziehbaren Türgriff mit separaten Synthesen für die zwei Teil-Kinematiken („Reihenschaltung“ von zwei Synthesen).
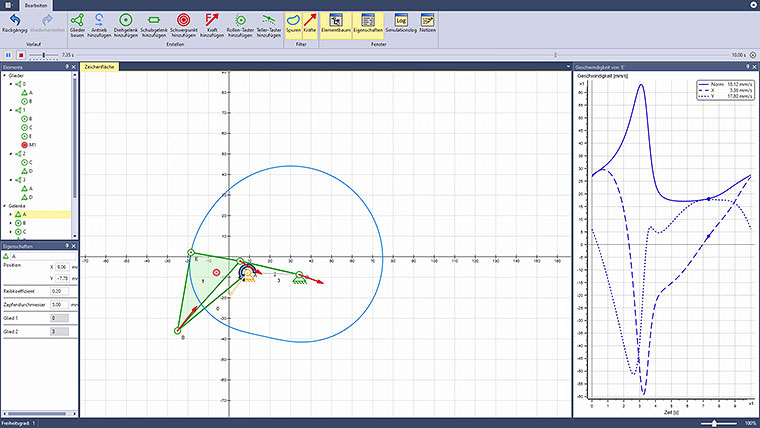
In diesem Beispiel einer Viergelenk-Kinematik werden verschiedene Handkraftverläufe in Echtzeit ermittelt. Das Konzept ist natürlich auch auf beliebige andere Mehrgelenksysteme übertragbar. Die kinematische Analyse ist ebenfalls erweiterbar, z.B. um die Ermittlung der entsprechenden Lagerkräfte.

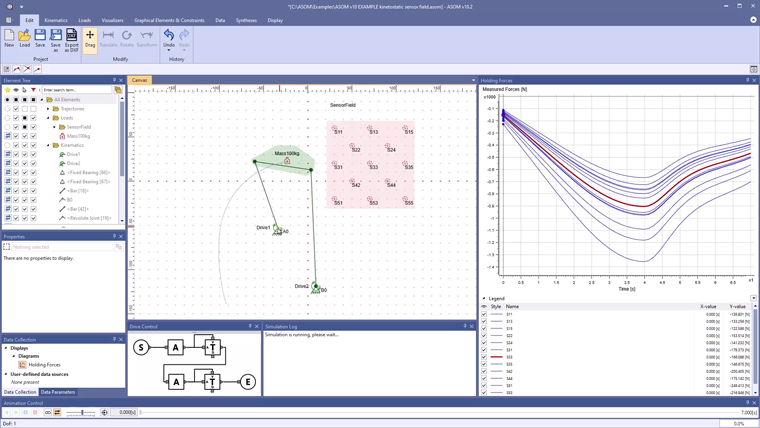
In diesem Beispiel wird in der Kinematik-Software ASOM v10 die Mechanik für einen Autositz im Automatik-Betrieb mit einem elektrischen Antrieb simuliert.
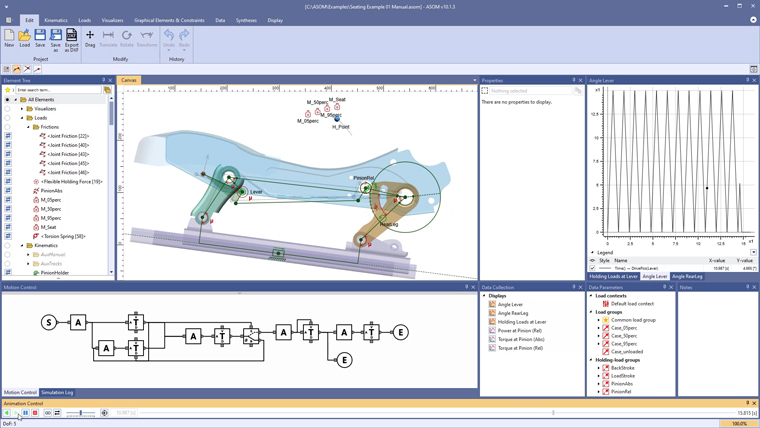
In diesem Beispiel wird in der Kinematik-Software ASOM v10 die Mechanik für einen Autositz im Betrieb mit Handhebel simuliert.
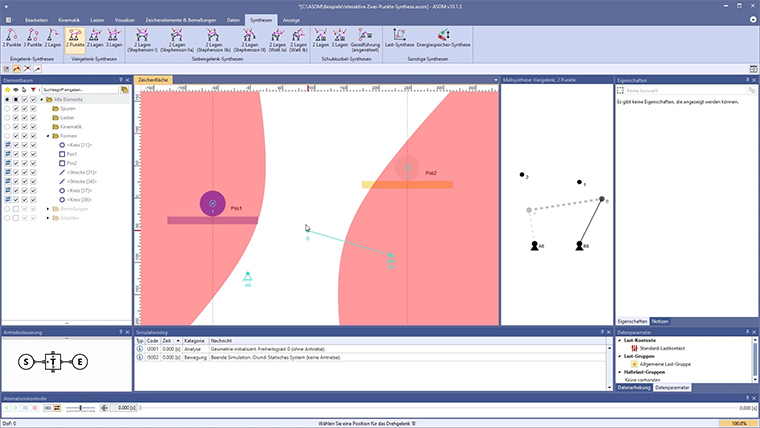
In diesem Beispiel wird in der Kinematik-Software ASOM v10 das interaktive Werkzeug der Zwei-Punkte-Synthese für Viergelenksysteme veranschaulicht.
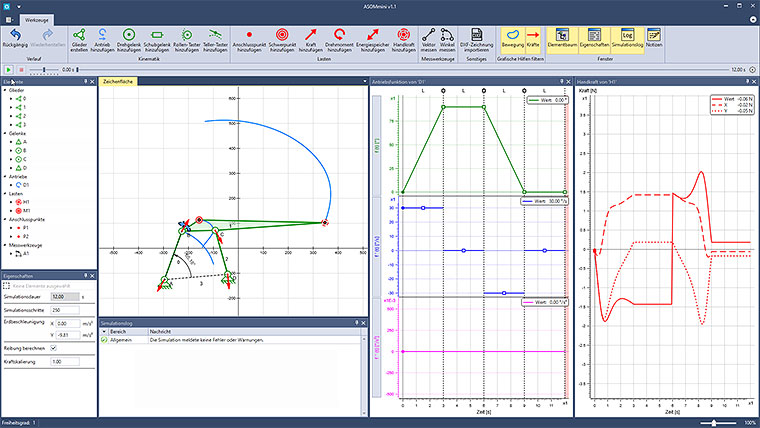
Nutzen Sie das neue Handkraft-Element in ASOMmini (ab Version 1.1), um in Echtzeit zu sehen, wie sich die nötige Handkraft zum Antrieb Ihres Systems mit dem vorgegeben Bewegungsprofil bei Änderungen entwickelt.
Erstellung eines einfachen planaren Mechanismus mit Hilfe der Kinematik-Software ASOMmini.

Hochinteraktive Mehrpositions-Synthese – hier: Drei-Lagen-Synthese – eines Viergelenksystems mit Hilfe der Kinematik-Software ASOMv7.