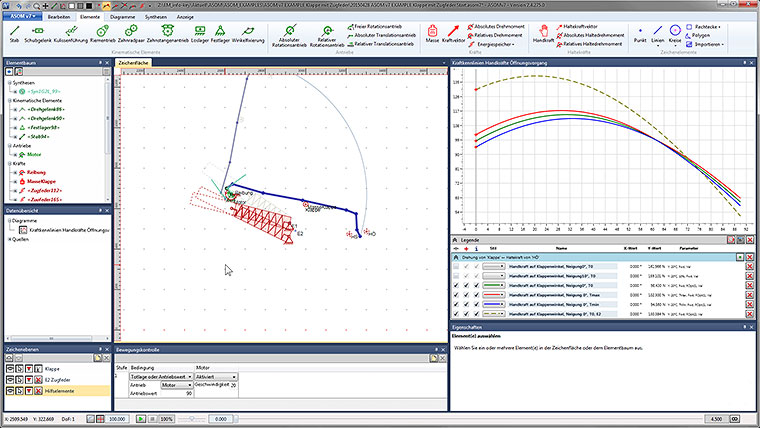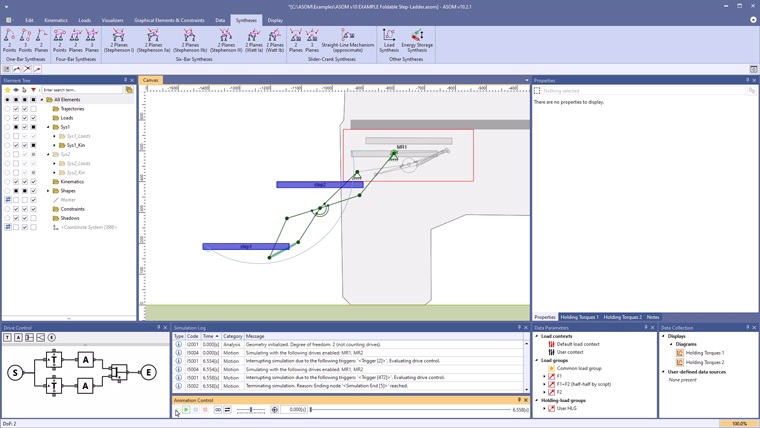
Der erste Mechanismus ist ein Siebengelenk mit einer Scherenkinematik. Das zweite Mehrgelenksystem ist ein Parallelgetriebe beziehungsweise ein Parallelkurbelgetriebe, was aber gleichzeitig auch als degenerierte Version eines Siebengelenkes desselben Typs wie im ersten Fall interpretiert werden kann. Für beide Fälle wurde eine kinematische Synthese zur Lösungsfindung herangezogen und dann eine Kraftanalyse vorgenommen. Daraus lassen sich z.B. die nötigen Drehmomente für beide Koppelgetriebe ermitteln. Außerdem wird gezeigt, wie mit Hilfe von Skripten Kräfte realisiert werden können, die von der Trittleiterposition (Stufen ein- oder ausgefahren) abhängig sind.