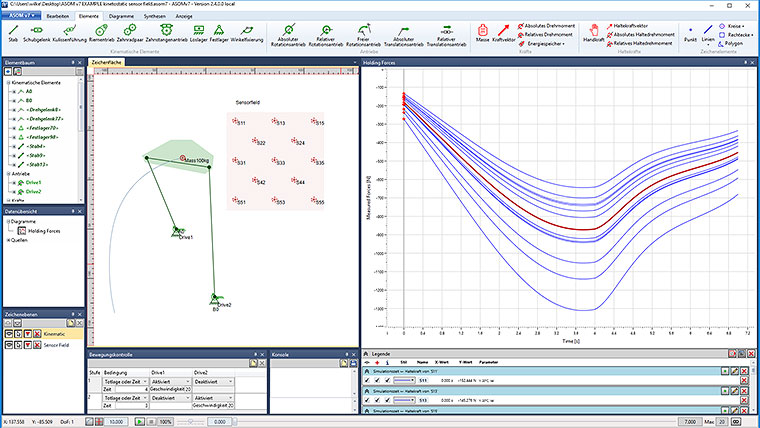
The necessary actuating forces when performing the pre-defined desired motion generate corresponding bearing forces, which are determined, taking into account friction coefficients and friction torques, and are then presented graphically.
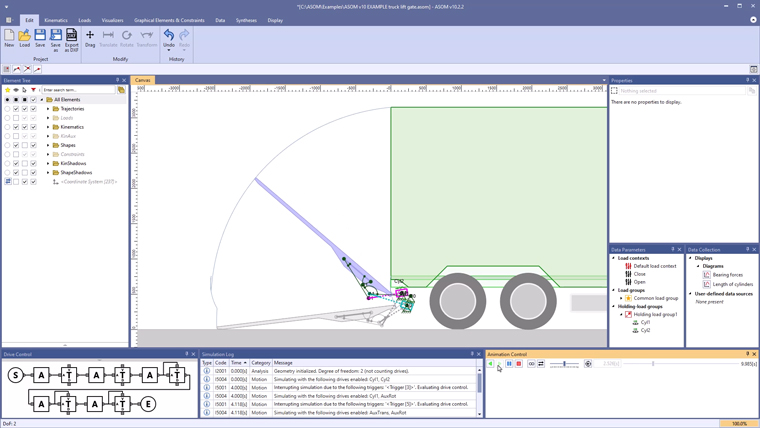
The mechanism can subsequently be modified. All measurements, like e.g. the necessary cylinder lengths and the resulting forces (here: bearing forces), will be adjusted according to these modifications immediately, or even in compressed time.
The motion of the lifting platform consists of several partial motions, such as opening, transition to the horizontal position, lifting and lowering of the horizontal platform, and the additional lowering of the loading edge onto the road surface. The extended drive control is used to define these partial motions and to combine them into an overall motion sequence.