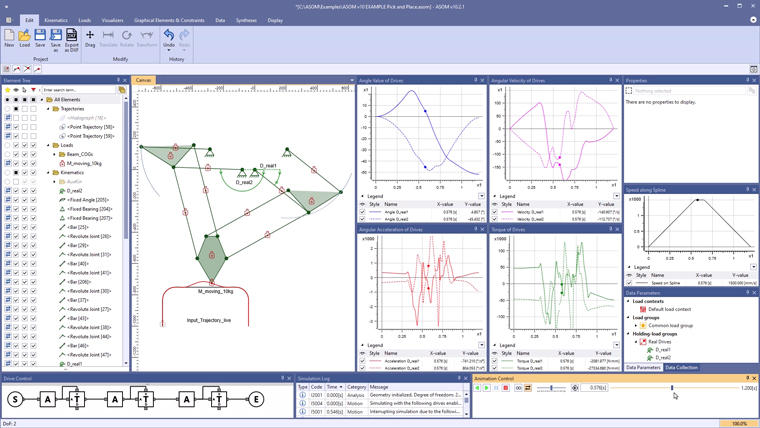
Here, the motion control is used to realize a motion through all the extreme positions of the system. The motor torque is transmitted to the four-bar linkage via a pair of gears. During the simulation, the required torque and power are measured at the location of the motor, always for 4 load cases for seat occupancy in parallel. Subsequently, the data are all plotted together in one graph each. In addition, it is shown how a change in the torque characteristics of an installed torsion spring affects the required motor torque in real time.