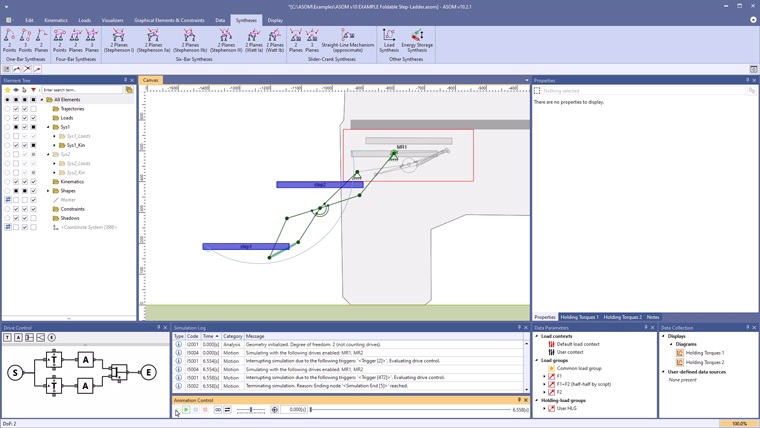
The first mechanism is a six-bar linkage with scissor kinematics. The second multi-bar system is a parallel linkage, or more specifically a parallel-crank linkage, which can also be interpreted as a degenerated version of a six-bar linkage of the same type as in the first case. In both cases, a kinematic synthesis was used to find a solution, and then a force analysis was carried out. From that, the necessary torques for both of the linkages can be determined, for example. Additionally, it is shown how to use scripts to implement forces that depend on the ladder position (steps extended or retracted).