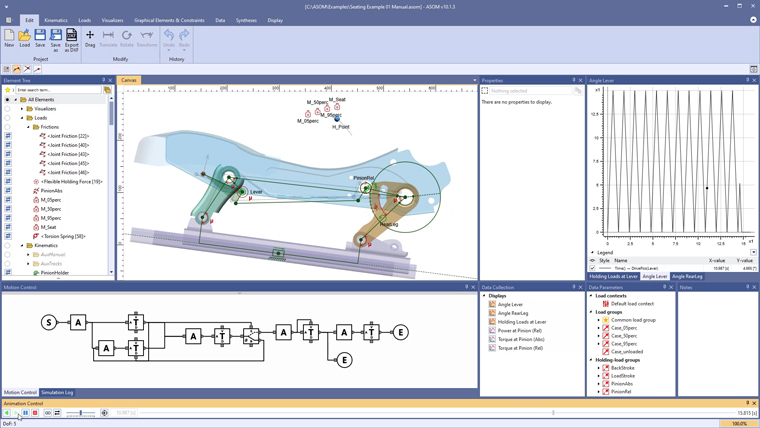
Dabei wird die Antriebssteuerung genutzt, um die Hebelhübe automatisch in einer Schleife abhängig vom gewünschten Endwinkel für den hinteren Lenker des Viergelenks und dem maximalen Winkelspiel des Hebels zu realisieren. Die Hebelkraft wird über ein Zahnradgetriebe auf das Viergelenk übertragen. Während der Simulation wird die benötigte Handkraft am Hebel in Richtung der jeweiligen aktuellen Bewegungsrichtung gemessen, abwechselnd für Lasthub und Rückhub und für 4 Lastfälle für die Sitzbelegung parallel. Anschließend werden die Daten alle zusammen in einem Diagramm aufgetragen.