The actuator is activated accordingly, in case of an impending frontal crash with potential pedestrian involvement. This generates as promptly as possible – meaning even before the actual impact happens – an increased safety clearance between engine hood and engine block.
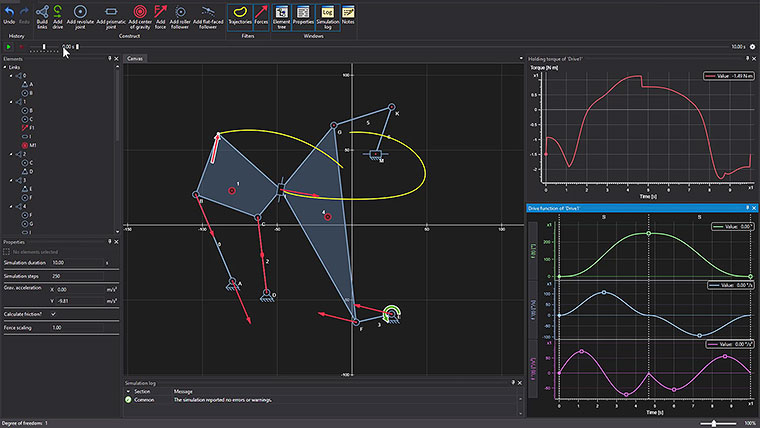
With ASOM, corresponding kinematics can be conceptualized, assembled, simulated, analyzed and interactively optimized. By way of the motion control in ASOM, the two operating modes ‘normal opening of the hood’ and ‘protection activation’ can both be simulated sequentially. To this end, the various kinematic degrees of freedom are locked and released accordingly.