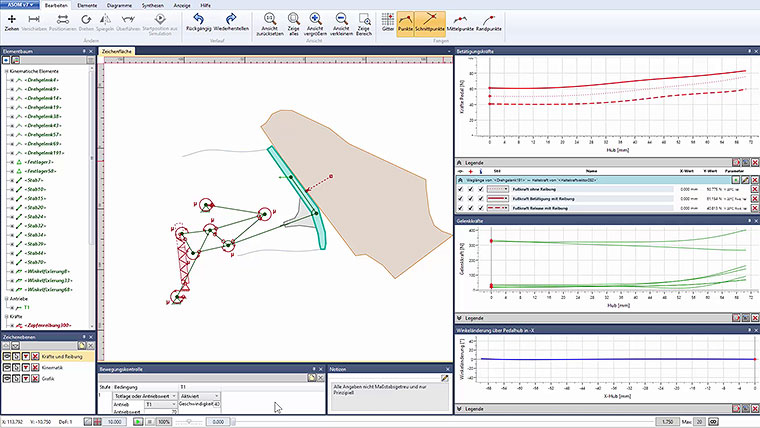
In the friction elements, a friction coefficient (μ) is entered. The friction forces resulting from that, dependent on the existing joint forces, then influence the necessary driving force for the system, always depending on the simulation direction (deploying or retracting).
Changes to the kinematics or the joint positions are simulated in real time (or rather compressed time). After each change, all of the affected computations, like those of the bearing forces of the necessary driving force, are determined immediately for the whole duration of the simulation.
It is thus possible, even with the friction computation, to modify or correct the starting and ending position of the landing gear very quickly, even without using our kinematic synthesis tools.