Abgleiten und Abrollen von kreisförmiger Form auf beliebiger Form
In diesen Beispielen wird gezeigt, dass es in der Kinematik-Software ASOM v10 auch möglich ist, beliebige Formen aufeinander abgleiten oder abrollen zu lassen.


In diesen Beispielen wird gezeigt, dass es in der Kinematik-Software ASOM v10 auch möglich ist, beliebige Formen aufeinander abgleiten oder abrollen zu lassen.
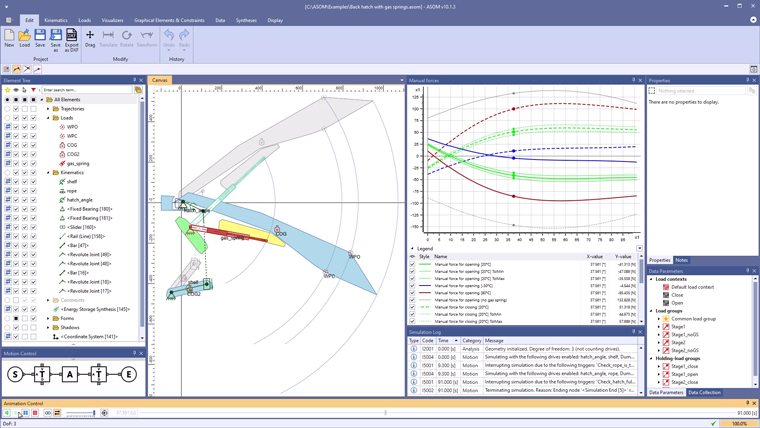
In diesem Beispiel wird in der Kinematik-Software ASOM v10 eine Heckklappe mit Gasfeder-Unterstützung simuliert, die als zusätzliches Feature eine Hutablage hat.
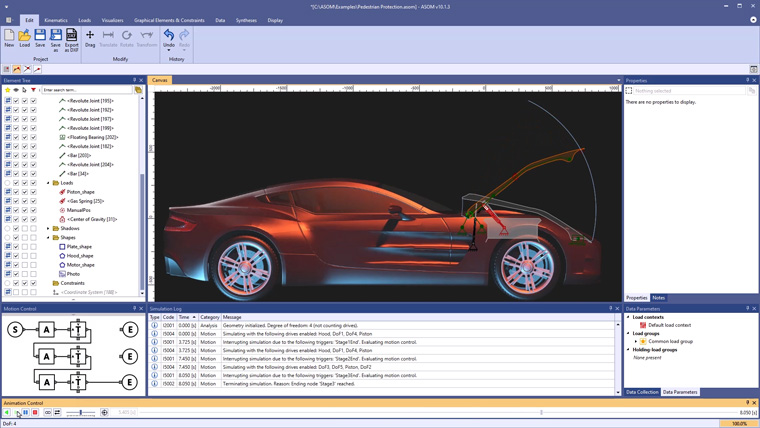
In diesem Beispiel wird in der Kinematik-Software ASOM v10 eine mögliche Mechanik für eine Motorhaube mit aktivem Fußgängerschutz simuliert.

In diesem Beispiel wird in der Kinematik-Software ASOM v10 die Mechanik für einen Autositz im Automatik-Betrieb mit einem elektrischen Antrieb simuliert.
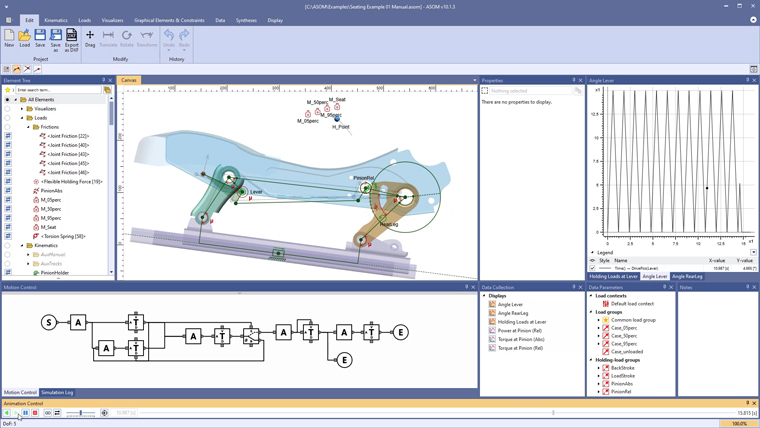
In diesem Beispiel wird in der Kinematik-Software ASOM v10 die Mechanik für einen Autositz im Betrieb mit Handhebel simuliert.
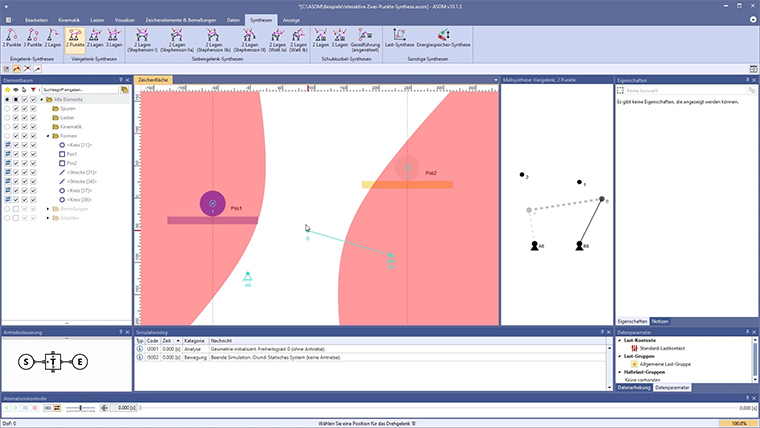
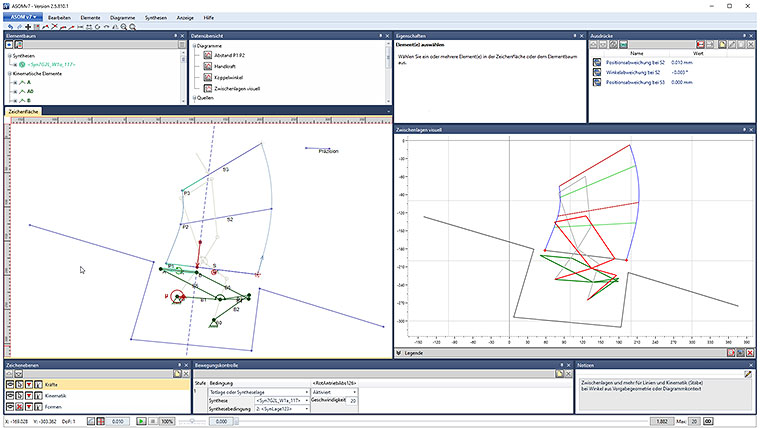
In diesem Beispiel wird in der Kinematik-Software ASOM v10 das interaktive Werkzeug der Zwei-Punkte-Synthese für Viergelenksysteme veranschaulicht.
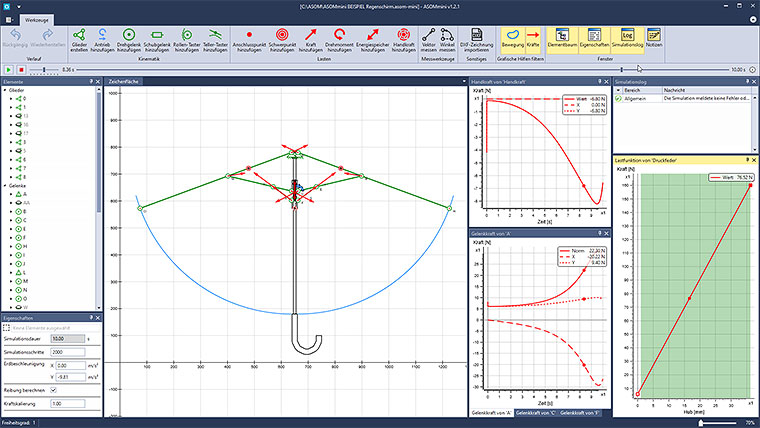
In diesem Beispielvideo wird gezeigt, wie in ASOMmini ein typischer Regenschirm modelliert und kinematisch untersucht werden kann.
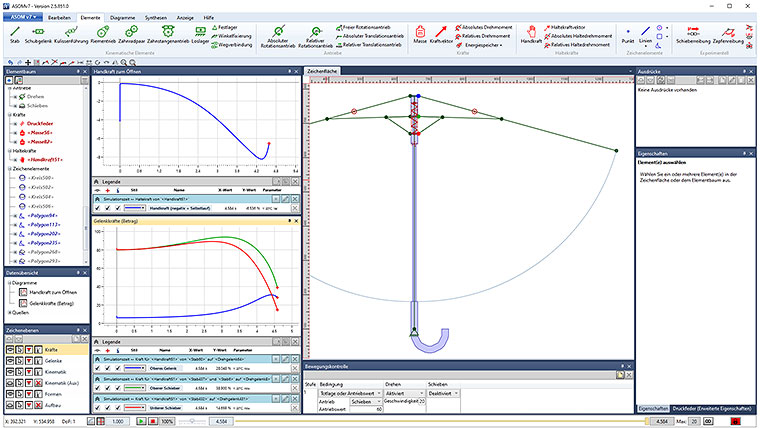
In diesem Video wird am Beispiel eines typischen Regenschirms gezeigt, wie man in ASOM v7 eine Kinematik gezielt variieren kann, um bessere Lösungen zu finden.
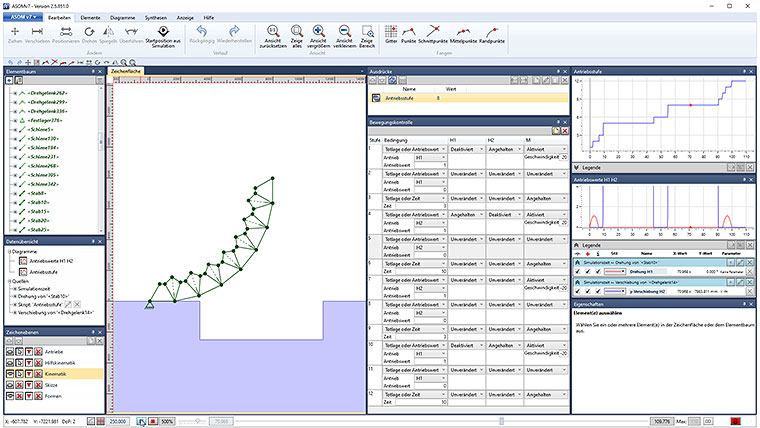
In diesem Video wird am Beispiel einer Rollbrücke gezeigt, wie komplexe Bewegungsabläufe mit der Kinematik-Software ASOM v7 erstellt und analysiert werden können.

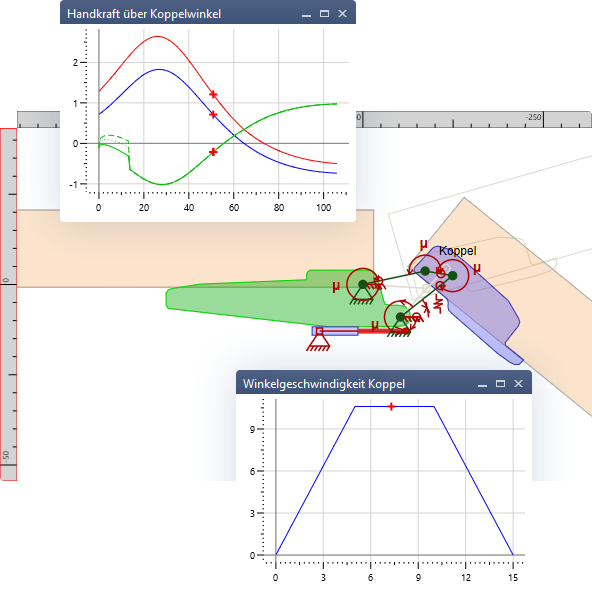
In diesem Beispiel wird gezeigt, dass die Kraftverhältnisse für ein Siebengelenk-Scharnier an der Klappe eines Küchenschrankes (siehe letztes Video) auch mit der Kinematik-Software ASOMmini schnell und einfach überprüft werden können.
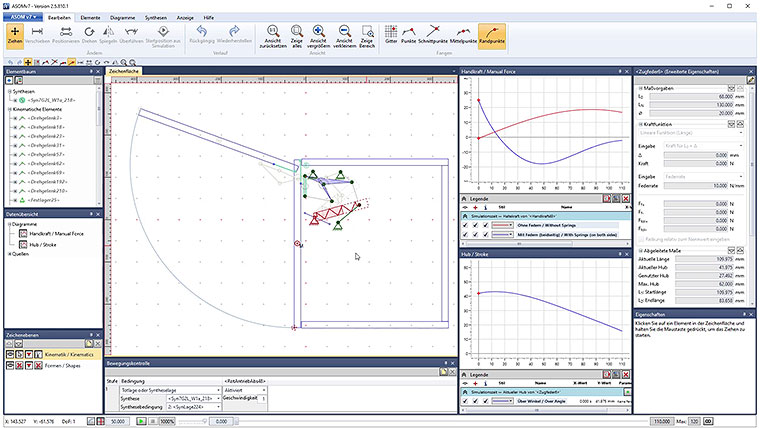
In diesem Beispiel wird gezeigt, wie die Kraftverhältnisse für ein Siebengelenk-Scharnier an der Klappe eines Küchenoberschrankes mit der Kinematik-Software ASOM v7 schnell und einfach überprüft werden können.
Wenn bei einer Synthese keine dritte Lagenvorgabe angeboten wird, können aber auch Skript-Datenquellen zur noch komfortableren Kontrolle einer mittleren Lage verwendet werden, indem sie den relevanten Teil der Zeichenebene in einem Diagramm nachstellen und mit zusätzlichen Anzeigen ergänzen.

Wenn bei einer Synthese keine dritte Lagenvorgabe angeboten wird, kann alternativ z.B. unser Skriptsystem zusammen mit Diagrammen genutzt werden, um in Echtzeit zu prüfen, wie gut eine mittlere Lage getroffen wird.
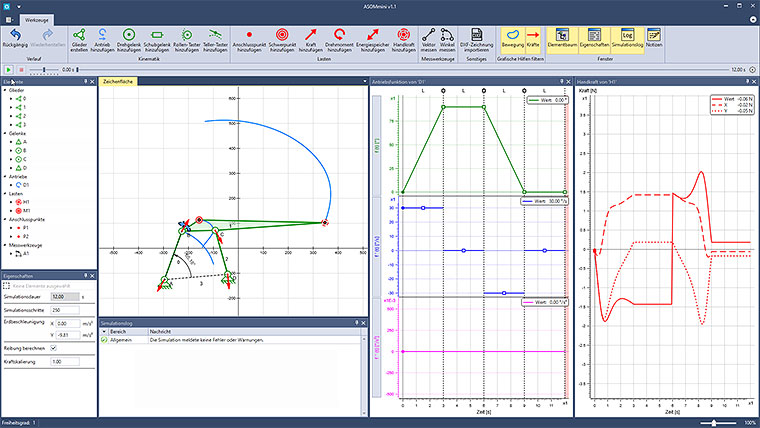
Nutzen Sie das neue Handkraft-Element in ASOMmini (ab Version 1.1), um in Echtzeit zu sehen, wie sich die nötige Handkraft zum Antrieb Ihres Systems mit dem vorgegeben Bewegungsprofil bei Änderungen entwickelt.
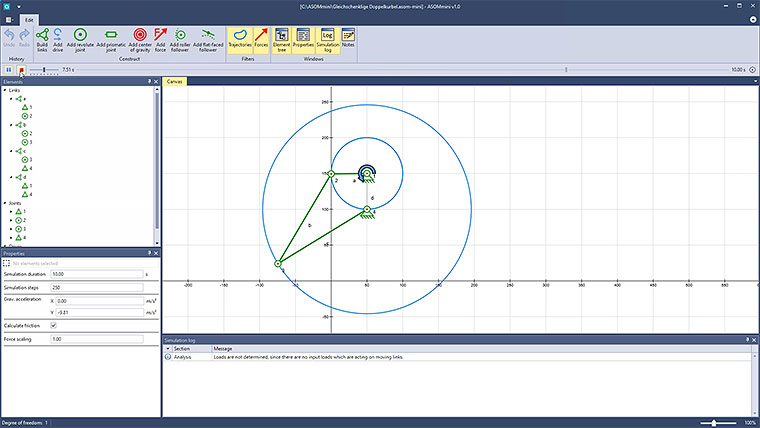
Im fünften und letzten Teil unserer Reihe betrachten wir die gleichschenkligen Getriebe: Gleichschenklige Doppelkurbel, Gleichschenklige Kurbelschwinge und die Rautenkurbel.