
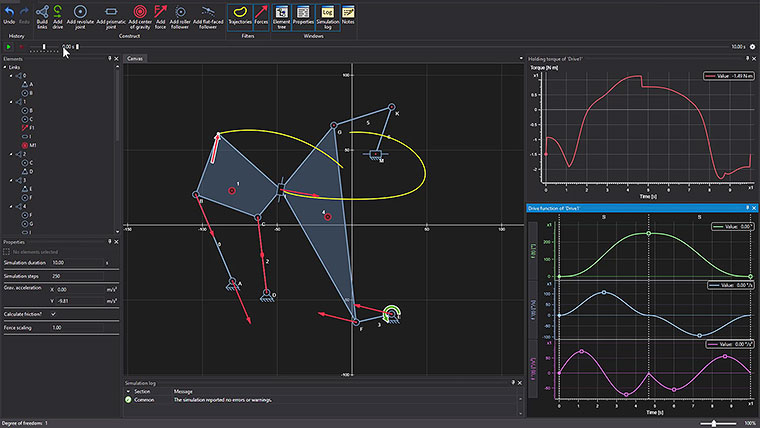
Der Freiheitsgrad des Systems ist ‚1‘.
Es wird eine Kraft eingeleitet und die resultierenden Lagerkräfte werden grafisch in der Animationsebene mit ausgegeben. Ebenso wird die nötige Haltekraft am Antrieb ermittelt und als Diagramm ausgegeben.
Dabei werden die Reibungen im System berücksichtigt.
Da Richtungswechsel bei den Relativwinkelgeschwindigkeiten an den Gelenken vorkommen, entstehen entsprechende Sprünge im Verlauf der Haltekraft.


