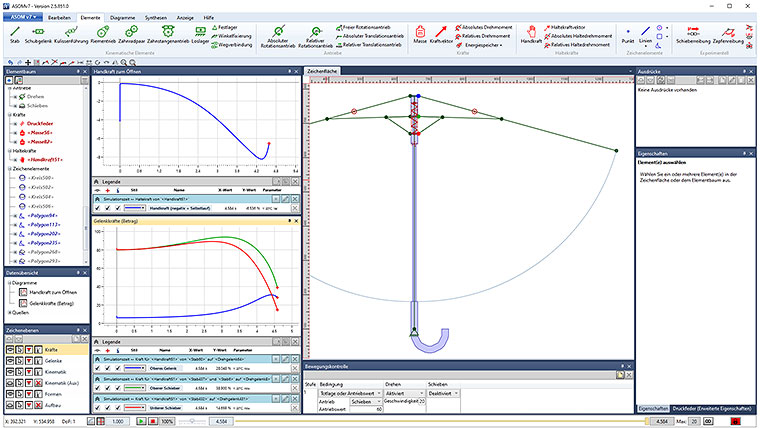
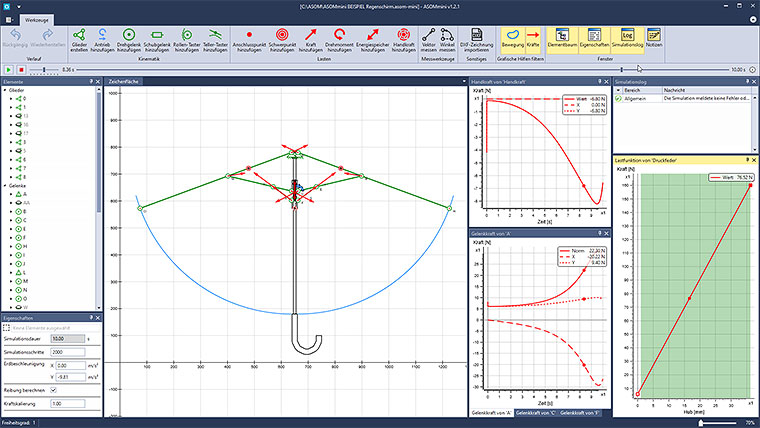
Im Beispiel wird ein Eingelenk erstellt und die Antriebsbewegung wird mit Hilfe der interaktiven Diagramme so modifiziert, dass es sich als Schwinge bewegt.
Die Modifikationen an dem Bewegungsablauf können direkt am Graphen für den Antriebswinkel vorgenommen werden. Alternativ geht das aber auch am Graphen für die Winkelgeschwindigkeit und / oder auch am Graphen für die Winkelbeschleunigung.
Die Antriebsfunktion kann in Segmente aufgeteilt werden. Jedem Segment kann eine bestimmte Charakteristik zugeordnet werden (Gerade, Sinusförmig, Trapezfunktion, Polynom 5. Grades) und der Übergang von Segment zu Segment kann auf diese Weise vorgegeben und variiert werden.