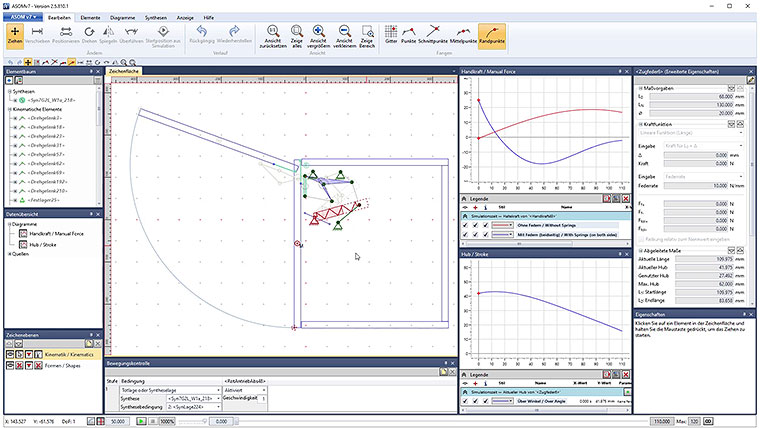
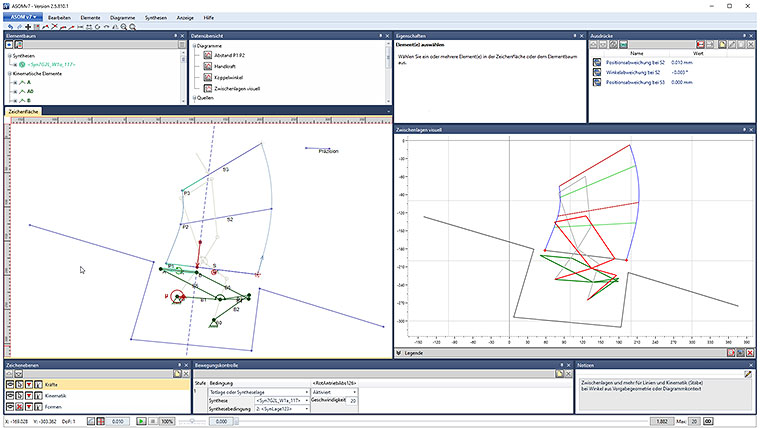
Forces and torques are considered in various alternative cases simultaneously, also taking into account further restrictions such as mounting conditions and collision conditions.
The two kinematic systems consist of a four-bar system, to which a crank-slider system is attached. The handle first moves into a desired intermediary kinematic position and later into the desired ending position. The desired initial, intermediate and ending positions are retained even when the positions of bearings or joints are modified. This is guaranteed by the two activated exact-pose syntheses. Altogether, eight cases are considered simultaneously: two possible drives, in each case with and without tension spring, and in each case with and without breakout force (2 x 2 x 2 = 8 cases). Thus the modification of a bearing, for example, immediately causes an update of all results for all eight cases.