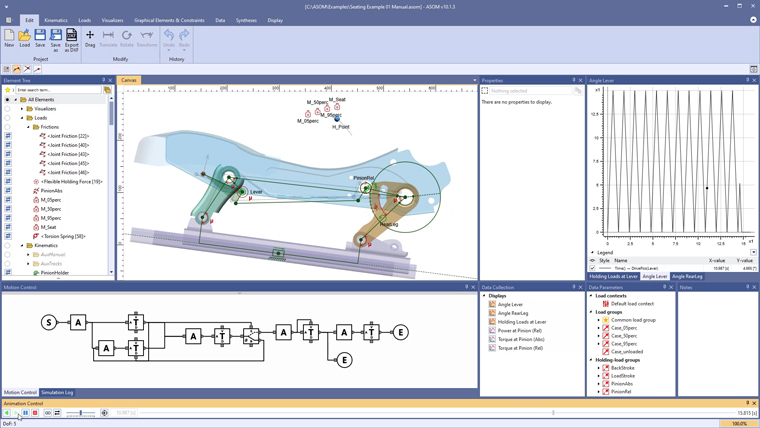
Here, the motion control is used to automatically realize the lever strokes in a loop depending on the desired end angle for the rear leg of the four-bar linkage and the maximum angular play of the lever. The lever force is transmitted to the four-bar linkage via a pair of gears. During the simulation, the required manual force for operating the lever is measured, always in the current direction of movement, alternately for load stroke and return stroke and for 4 load cases for seat occupancy in parallel. All the data is then plotted together in one diagram.