The three degrees of freedom can be controlled by three actuators.
In this example, these actuators have been matched to each other in such a way that the bucket movement of the simulated excavator arm shows a reasonably realistic behaviour.
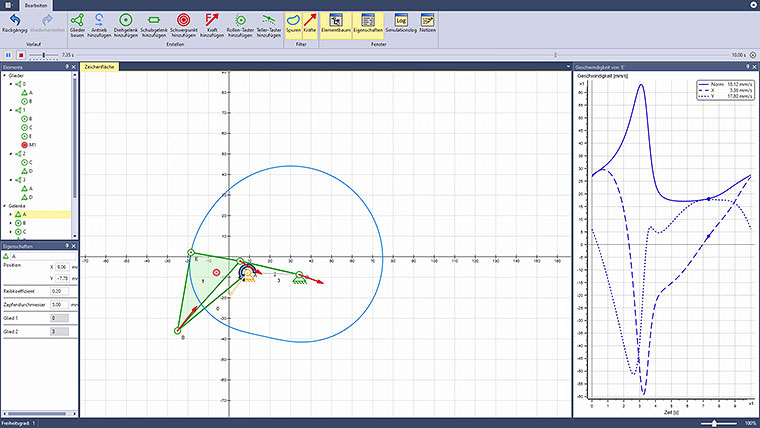
Changes in the drive control have a clearly visible influence on the movement of the excavator arm.
In addition, the bearing forces in the individual joints are shown in the animation window and a diagram is created for one bearing force (the one for bearing ‘B’) over the entire course of the simulation. The bearing force components are also displayed.