Kinematik eines Regenschirms in ASOMmini
In diesem Beispielvideo wird gezeigt, wie in ASOMmini ein typischer Regenschirm modelliert und kinematisch untersucht werden kann.

In diesem Beispielvideo wird gezeigt, wie in ASOMmini ein typischer Regenschirm modelliert und kinematisch untersucht werden kann.

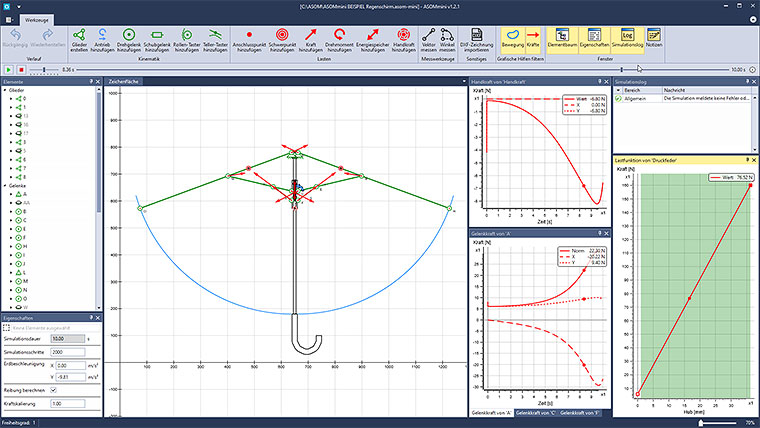
In diesem Beispiel wird gezeigt, dass die Kraftverhältnisse für ein Siebengelenk-Scharnier an der Klappe eines Küchenschrankes (siehe letztes Video) auch mit der Kinematik-Software ASOMmini schnell und einfach überprüft werden können.
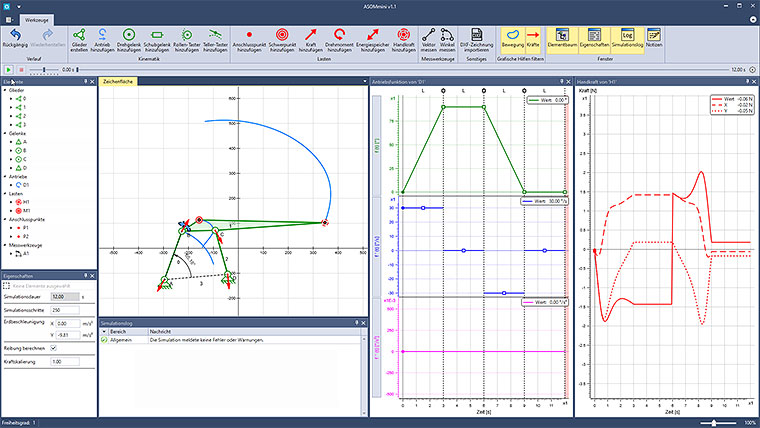
Nutzen Sie das neue Handkraft-Element in ASOMmini (ab Version 1.1), um in Echtzeit zu sehen, wie sich die nötige Handkraft zum Antrieb Ihres Systems mit dem vorgegeben Bewegungsprofil bei Änderungen entwickelt.
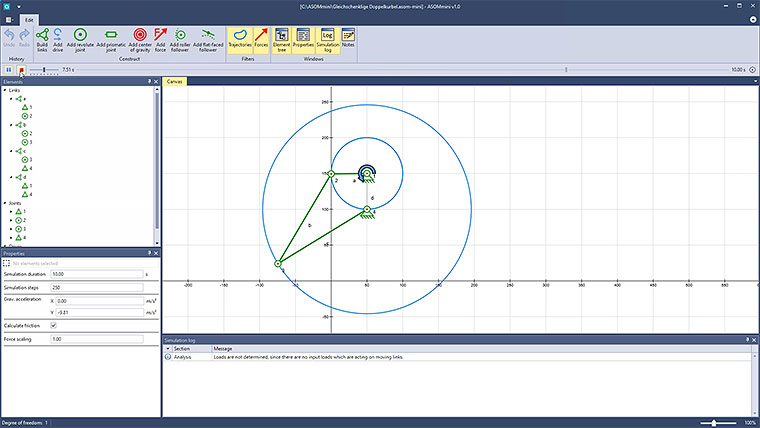
Im fünften und letzten Teil unserer Reihe betrachten wir die gleichschenkligen Getriebe: Gleichschenklige Doppelkurbel, Gleichschenklige Kurbelschwinge und die Rautenkurbel.

Im vierten Teil unserer Reihe behandeln wir die Parallelkurbel und Antiparallelkurbel.

In diesem dritten Teil unserer Reihe behandeln wir die Doppelschwinge. Bei diesem Typ von Viergelenk sind beide Lenker nicht umlauffähig.

Weiter geht es mit der Doppelkurbel. Im Gegensatz zur Kurbelschwinge sind bei ihr beide Lenker voll umlauffähig, woraus sich ihr Name ergibt.
Den Start in unserer Videoreihe macht die Kurbelschwinge. Bei der Kurbelschwinge ist ein Lenker umlauffähig und der andere nicht.
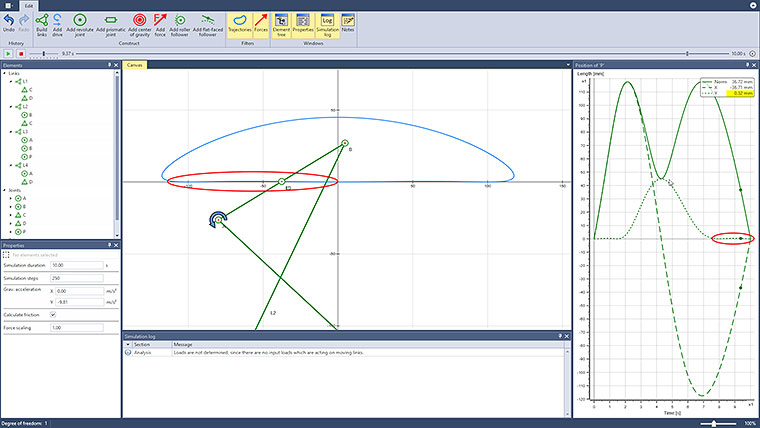
Im folgenden Video wird mit Hilfe der Kinematik-Simulations-Software ASOMmini eine angenäherte Geradführung nach Tschebyschow konstruiert und animiert.

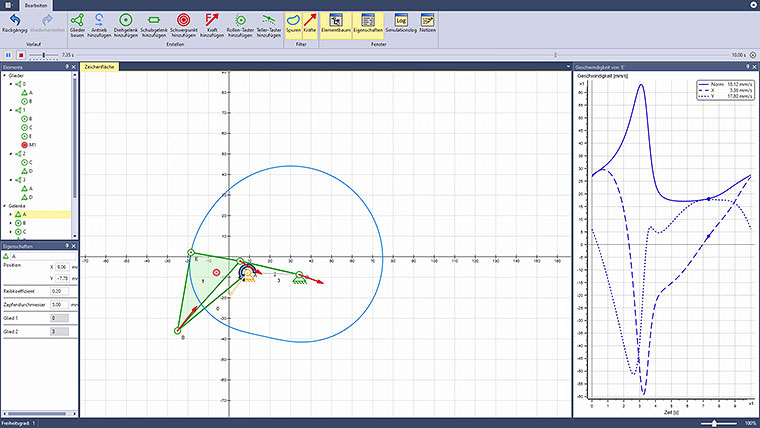
Erstellung einer einfachen Kinematik und Modifikation der Antriebsfunktion mit der Mechanismensoftware ASOMmini.

In diesem Beispiel sind ein Viergelenksystem und ein Eingelenksystem inklusive ihrer Bewegungsabläufe vorgegeben. Diese können in ASOMmini mit einem Rollentaster miteinander verbunden werden.

Im Beispiel wird ein Baggerarm als planarer Mechanismus animiert. Die drei Freiheitsgrade erlauben eine Ansteuerung mit drei Aktuatoren.
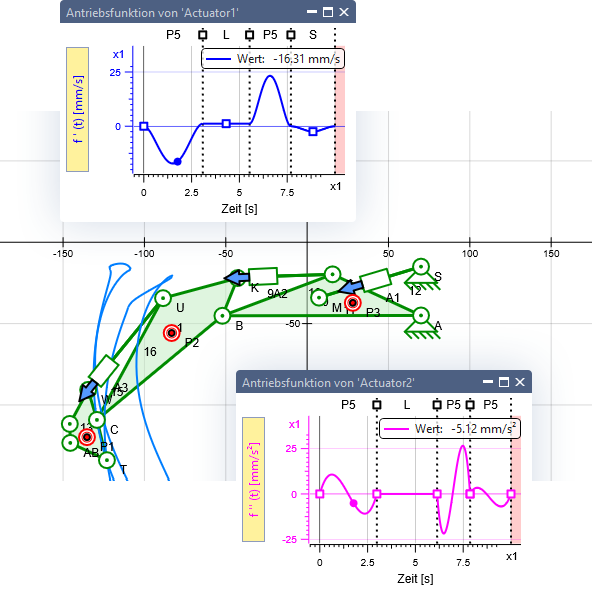
Das Beispiel zeigt ein willkürliches Mehrgelenksystem mit diversen Drehgelenken und Schubgelenken.

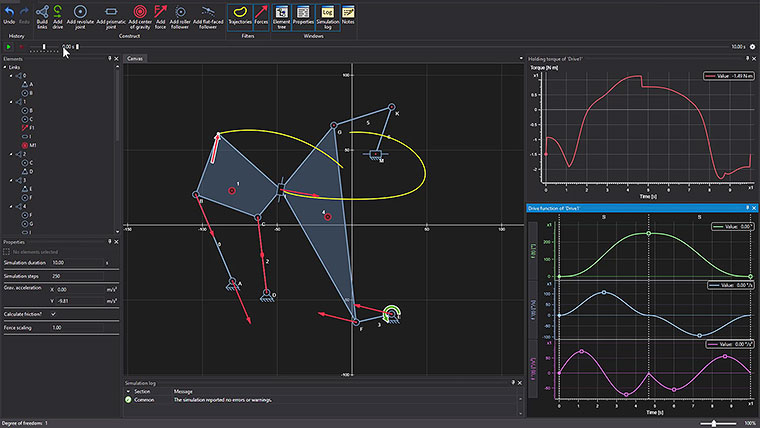
Animation eines Siebengelenksystems mit der Kinematik Software ASOMmini.
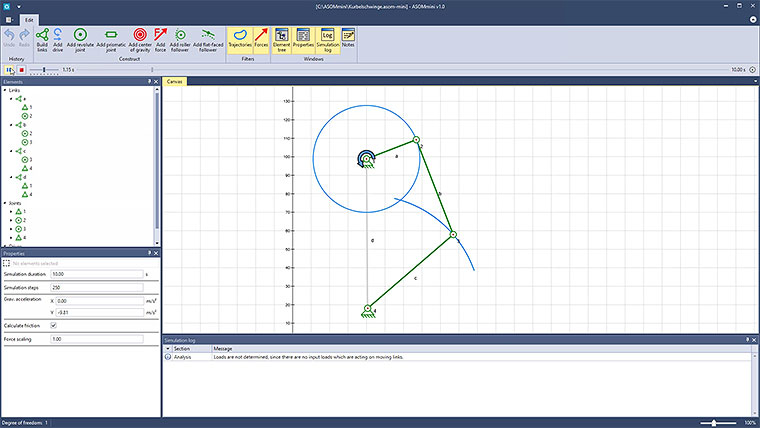
Erstellung eines einfachen planaren Mechanismus mit Hilfe der Kinematik-Software ASOMmini.