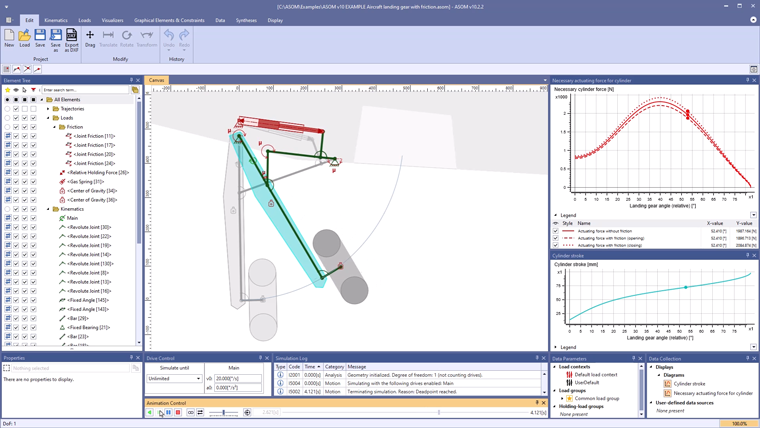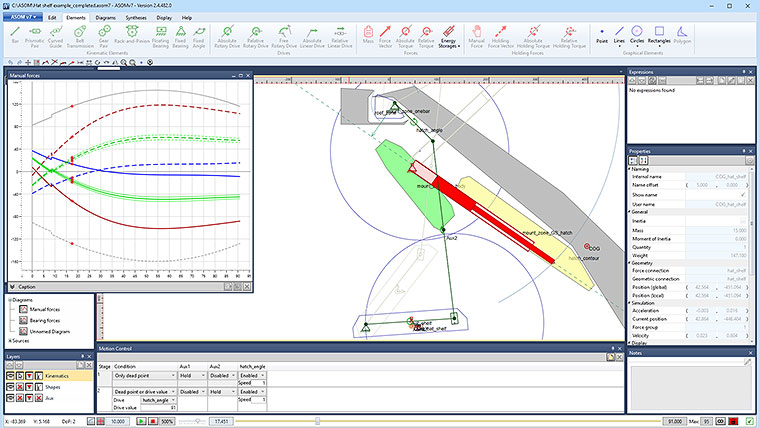
Das kinematische System wird dadurch von einem Eingelenk zu einem Viergelenk erweitert. Die Hutablage wird dabei zunächst sehr einfach modelliert. Dieses Modell wird dann immer weiter verfeinert, bis schließlich der gewünschte Grad an Genauigkeit und Allgemeingültigkeit erreicht ist. Die kinematischen Bewegungsabläufe werden mit Hilfe der Antriebskontrolle in mehreren Stufen realisiert. Die kinematischen Totlagen dienen dabei als Triggerpunkte für die Abschnitte der Simulation. Für die Berechnung der Ergebnisse wird das in der Kinematik-Software ASOM v7 vorhandene Skriptsystem herangezogen.