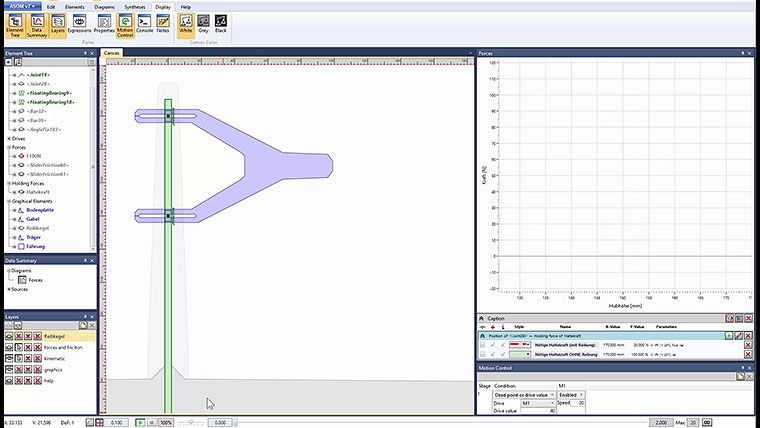
Friction occurs between a vertical guideway and a fork with a mass in the center of gravity and two contact points on the guideway. This friction is described in each case by a coefficient of friction or a friction value in the two sliding bearings, which, for simplicity, are assumed to be identical here.
The resulting friction is thus dependent on the normal forces acting on the sliding bearings, which in turn are dependent on the distance between the fork center of gravity and the guideway.
The opposing holding force indicates whether the system is in a self-moving or self-locking state. If there were no friction in the guideway, the opposing holding force would always be as great as the weight of the fork, regardless of the distance between the centre of gravity and the guideway.
If, on the other hand, no opposing holding force is necessary or its values become negative, then the system is in the self-locking state. The further the fork is pulled out – i.e. the greater the distance between the center of mass of the fork and the guideway becomes – the smaller is the required additional opposing holding force.
This is calculated, displayed and animated with the help of the kinematics software ASOM v7.