Videoreihe Viergelenke in ASOMmini (4/5): Die Parallel- und Antiparallelkurbel
Im vierten Teil unserer Reihe behandeln wir die Parallelkurbel und Antiparallelkurbel.


Im vierten Teil unserer Reihe behandeln wir die Parallelkurbel und Antiparallelkurbel.

In diesem dritten Teil unserer Reihe behandeln wir die Doppelschwinge. Bei diesem Typ von Viergelenk sind beide Lenker nicht umlauffähig.

Weiter geht es mit der Doppelkurbel. Im Gegensatz zur Kurbelschwinge sind bei ihr beide Lenker voll umlauffähig, woraus sich ihr Name ergibt.
Den Start in unserer Videoreihe macht die Kurbelschwinge. Bei der Kurbelschwinge ist ein Lenker umlauffähig und der andere nicht.
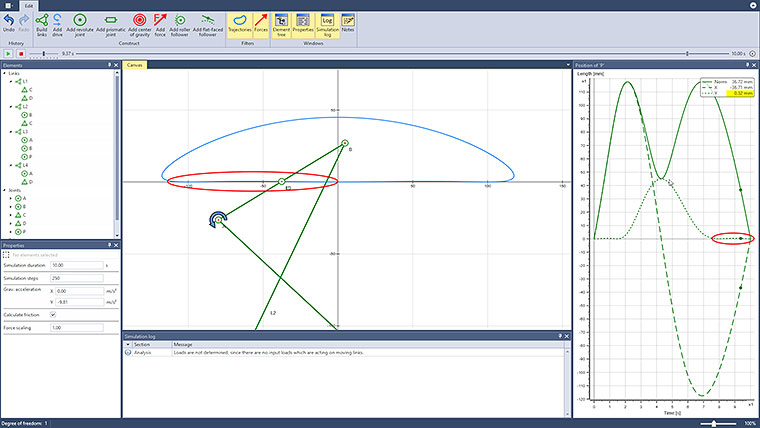
Im folgenden Video wird mit Hilfe der Kinematik-Simulations-Software ASOMmini eine angenäherte Geradführung nach Tschebyschow konstruiert und animiert.

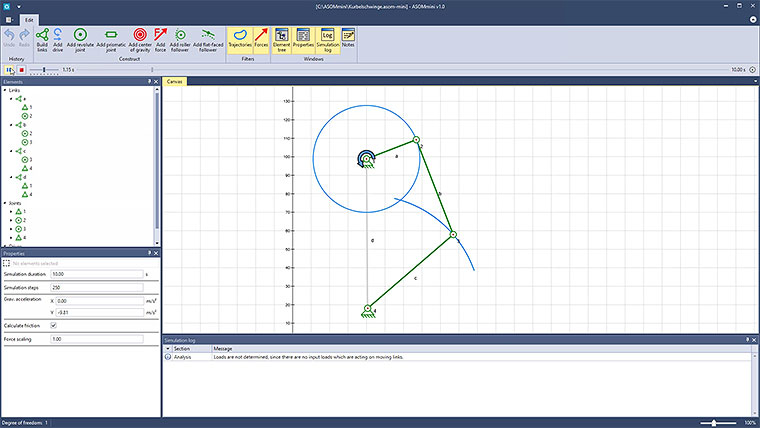
Erstellung einer einfachen Kinematik und Modifikation der Antriebsfunktion mit der Mechanismensoftware ASOMmini.

In diesem Beispiel sind ein Viergelenksystem und ein Eingelenksystem inklusive ihrer Bewegungsabläufe vorgegeben. Diese können in ASOMmini mit einem Rollentaster miteinander verbunden werden.

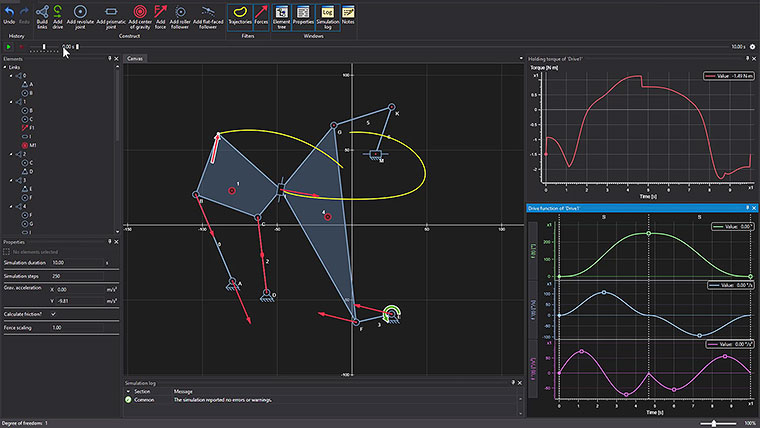
Im Beispiel wird ein Baggerarm als planarer Mechanismus animiert. Die drei Freiheitsgrade erlauben eine Ansteuerung mit drei Aktuatoren.
Das Beispiel zeigt ein willkürliches Mehrgelenksystem mit diversen Drehgelenken und Schubgelenken.

Animation eines Siebengelenksystems mit der Kinematik Software ASOMmini.
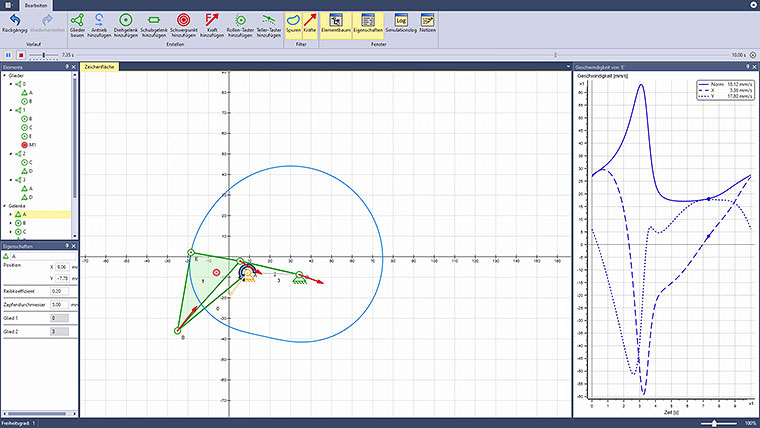
Erstellung eines einfachen planaren Mechanismus mit Hilfe der Kinematik-Software ASOMmini.
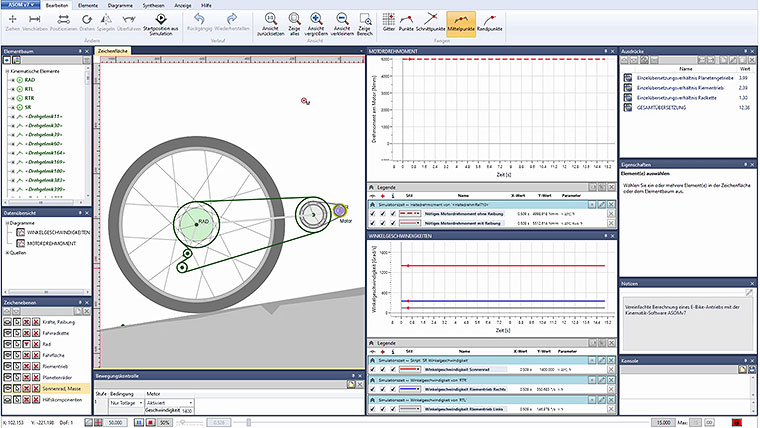
Abbildung eines prinzipiellen E-Drive-Antriebes für ein Fahrrad mit der Kinematik-Software ASOM v7.

An drei kurzen Beispielen (Seating, Heckklappe und Spoiler) wird demonstriert, wie Autobauer und Zulieferer die Kinematik-Software ASOM v7 einsetzen können um typische industrie-spezifische Probleme zu lösen.
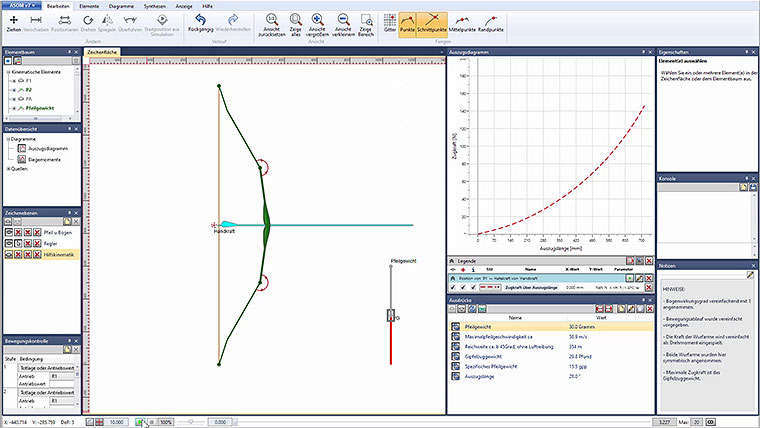
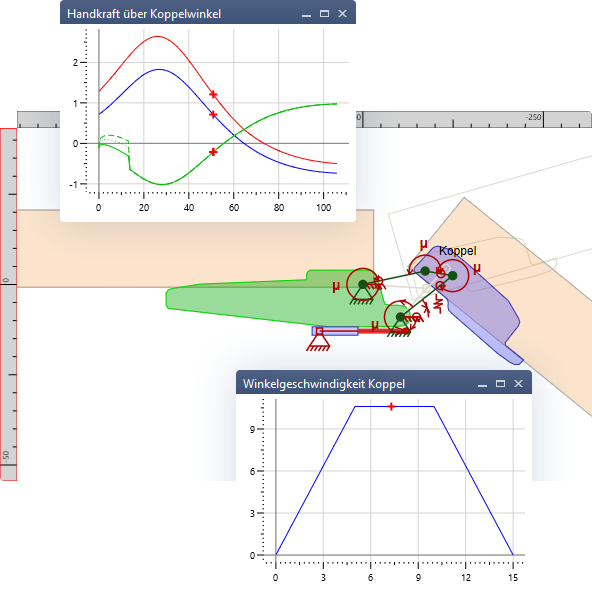
Experimentelles Beispiel zu Pfeil und Bogen, animiert und berechnet in der Kinematik-Software ASOM v7.
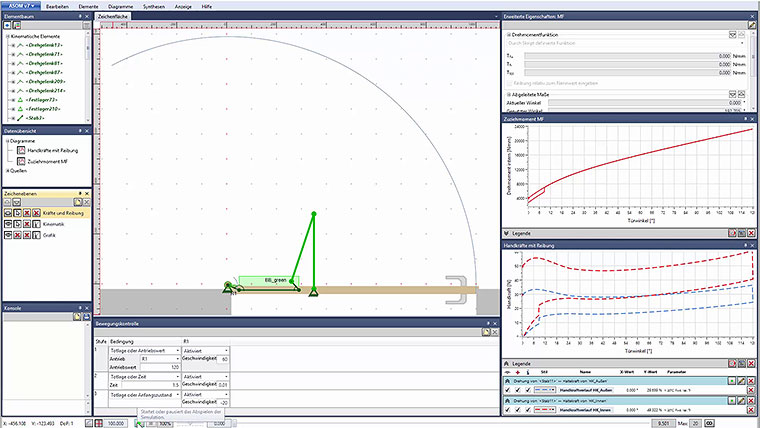
Prinzipielles Beispiel zu einem Türschließer, simuliert mit der Kinematik-Auslegungssoftware ASOM v7