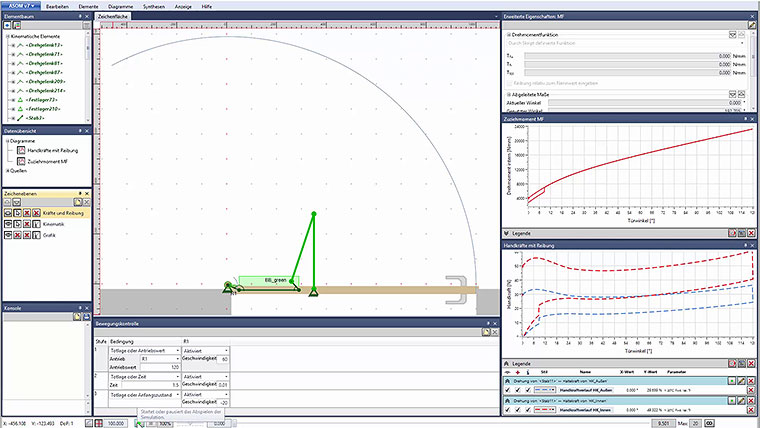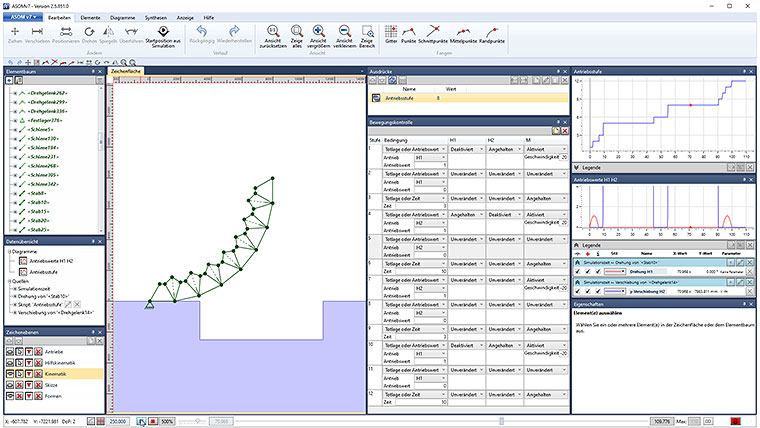
Die Rollbrücke ist in der Realität nicht immer gleichartig kinematisch voll bestimmt bzw. im Kontakt mit der Umgebung von Moment zu Moment unterschiedlich voll bestimmt. Wo ihre Freiheitsgrade sind, wechselt also mit der Zeit. Dies wird hier über abwechselnd haltend und freilaufend geschaltete Hilfsantriebe modelliert. In der Bewegungskontrolle wird über Regeln definiert, was wie nacheinander ablaufen soll.
Mit Hilfe von Skriptfunktionen kann anschließend in Ausdrücken und Diagrammen veranschaulicht werden, welche Stufe der Bewegungskontrolle während der Simulation gerade aktiv ist.
Die Hydraulikantriebe wurden hierbei so simuliert, dass ein Hauptantrieb seine Bewegung (bzw. Längenänderung) über mehrere Wegverbindungen in Reihe gleichmäßig auf alle Schubstangen überträgt.
Eintrag zur „echten“ Rollbrücke auf Wikipedia: https://de.wikipedia.org/wiki/The_Rolling_Bridge