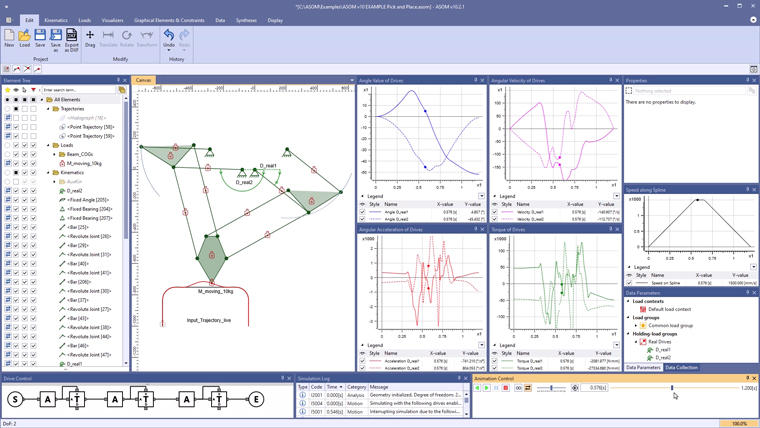
Die Schritte dafür sind im Einzelnen:
- Ein Viergelenksystem wird als kinematische Kette aufgebaut
- Das gestellfeste Objekt wird definiert
- Eine Antriebsfunktion wird an einem der vier Gelenkpunkte definiert
- Spuren bzw. kinematische Verläufe werden sichtbar geschaltet
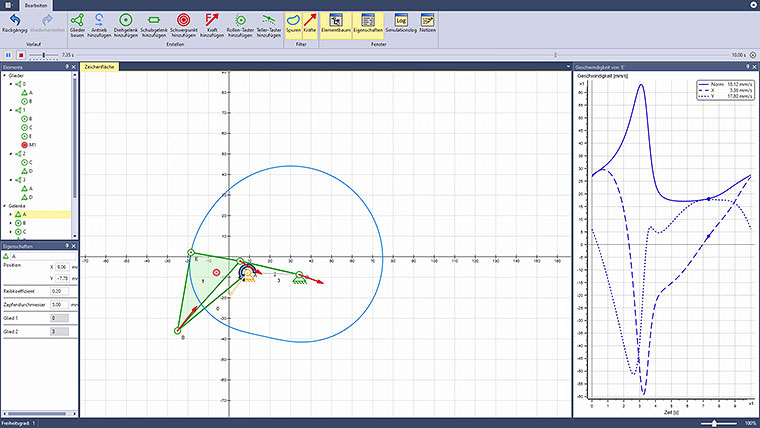
- Ein Diagramm zum Geschwindigkeitsverlauf inklusive ihrer Komponenten wird erstellt
- Die Koppel erhält eine Masse und es werden die resultierenden Lagerkräfte visualisiert
- Den Lagerpunkten werden Reibungen hinzugefügt
- Teilweise werden die Reibkoeffizienten und Reibkreisdurchmesser angepasst
- Die Kinematik wird so verändert, dass sie umlauffähig ist
- Die Bewegungsanimation wird gestartet