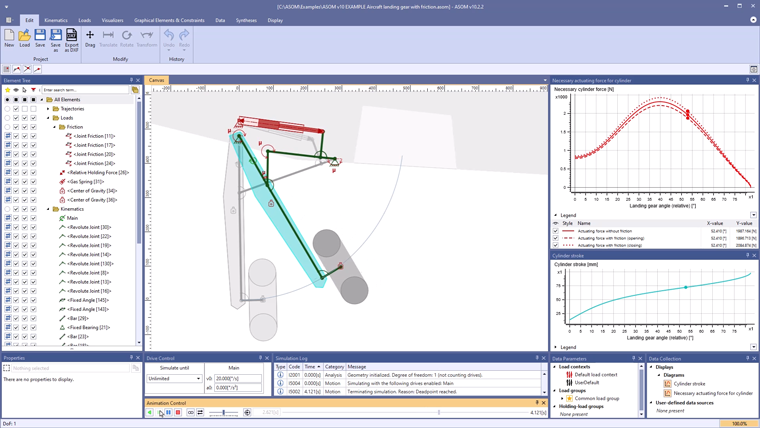
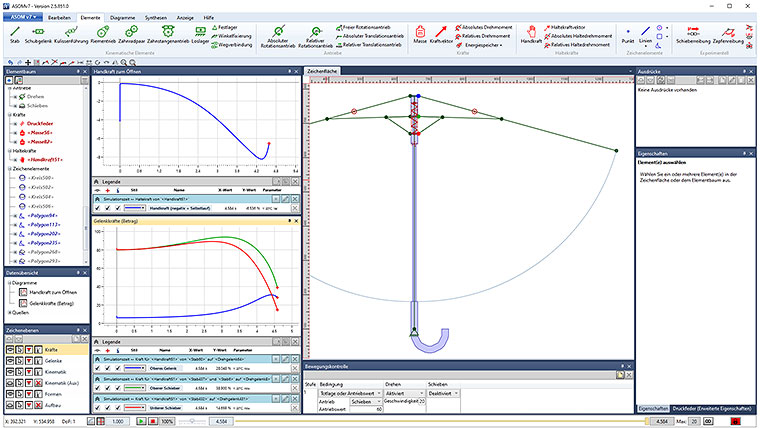
Dieses Beispiel zeigt eine Heckspoilerkinematik mit zwei möglichen Antriebsoptionen an verschiedenen Stellen, an denen jeweils auch ein virtueller Drehmomentsensor sitzt. Auf diese Weise können etwa die nötigen, richtungsabhängigen Drehmomente für den Antrieb an zwei Stellen zugleich erhoben und miteinander verglichen werden. Dabei werden diverse Massen für die Hebel und Schwingen berücksichtigt, diverse sonstige wirkende Kräfte und Kraftkomponenten (zum Beispiel eine Windlast) und auch diverse kraftabhängige Lagerreibungen (Zapfenreibungen). Diese repräsentieren Gleitreibungen (nicht Haftreibungen) in Abhängigkeit von unterschiedlichen Gleitreibungskoeffizienten für die Lager (nach dem Coulombschen Gesetz).