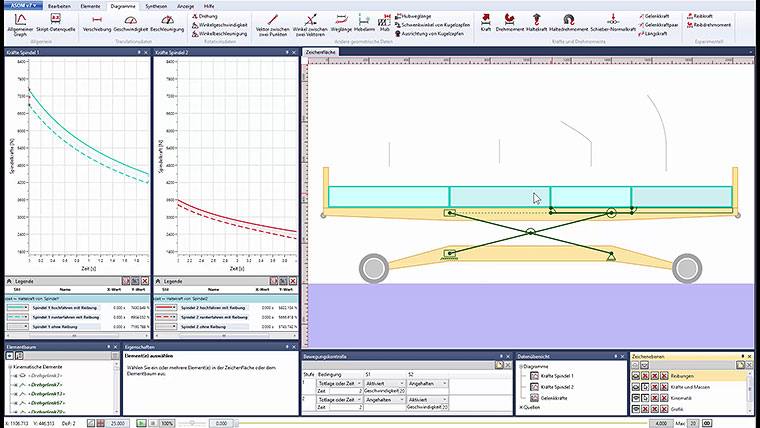
Diese wurden in diesem Beispiel so aufeinander abgestimmt, dass die Schaufelbewegung des simulierten Baggerarms ein halbwegs realistisches Verhalten zeigt.
Änderungen in der Antriebssteuerung haben einen gut sichtbaren Einfluss auf den Bewegungsablauf des Baggerarms.
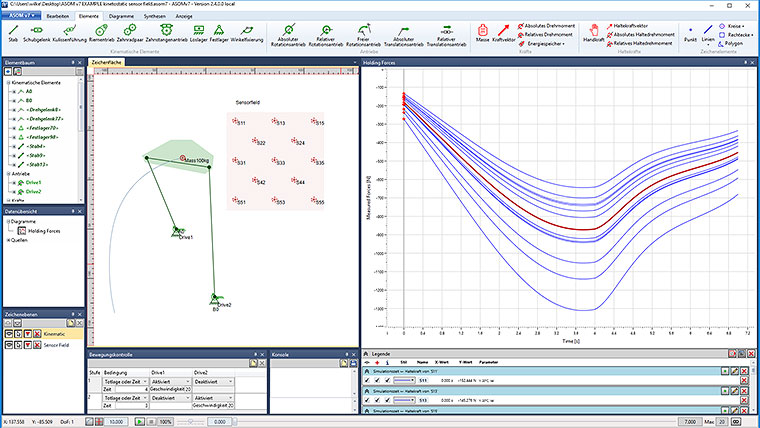
Darüber hinaus werden die Lagerkräfte in den einzelnen Gelenken im Animationsfenster mit eingeblendet und für eine Lagerkraft (hier Lager ‚B‘) ein Diagramm über den gesamten Zeitverlauf erstellt. Die Lagerkraftkomponenten werden dabei ebenso angezeigt.