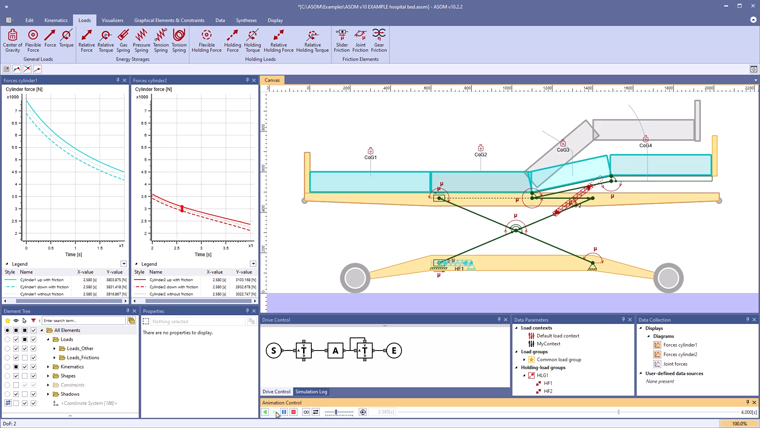
Kinematik eines Krankenhausbettes in ASOM
Krankenhausbetten sind mit zwei wichtigen Antrieben ausgestattet: Einer für die Höhenverstellung des gesamten Bettes und einer für die Neigung des Fußbereichs. Solche Systeme kommen in der Realität häufig in Form von Spindeltrieben zum Einsatz.