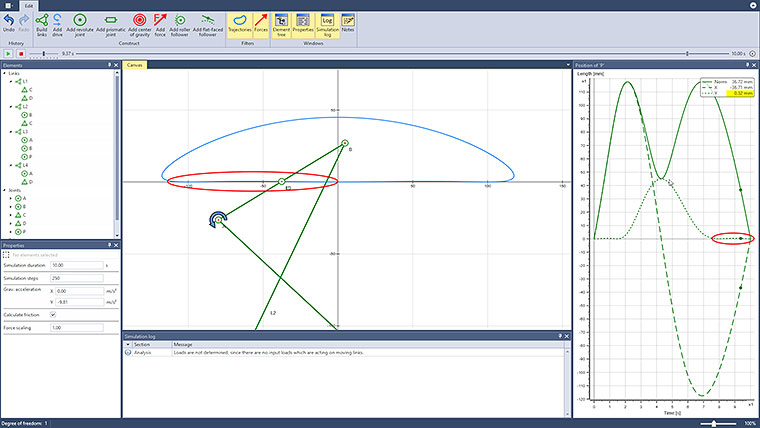
Das Beispiel zeigt ein umlauffähiges Siebengelenksystem.
Es werden einfache Positionsänderungen an den Gelenkpunkten vorgenommen und die daraus resultierenden Bahnänderungen bzw. Positionsänderungen und Änderungen in der Pfadlänge werden in Diagrammen dargestellt.