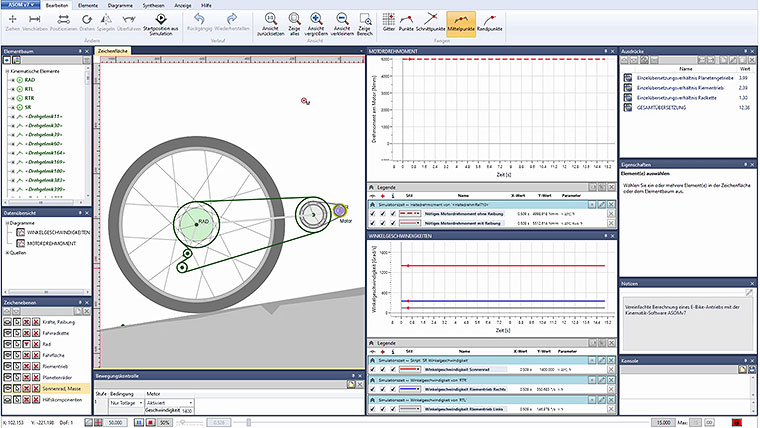
Das Beispiel zeigt den wesentlichen kinematischen Aufbau eines typischen E-Drive-Antriebes, beginnend mit dem Antriebsritzel, das mit dem Sonnenrad eines Planetengetriebes verbunden ist, weiter übergehend auf die Planetenräder und dann über einen Riemenantrieb bzw. Kettenantrieb übergehend auf das Rad, bei dem letztlich die Winkelgeschwindigkeit in eine translatorische Bewegung überführt wird.
Beim Variieren eines Zahnraddurchmessers – hier beispielhaft für die Antriebskette – passt die Kinematik-Software ASOMv7 die resultierenden Momente und Übersetzungsverhältnisse entsprechend an.
Das Variieren der Steigung hat ebenso Auswirkung auf die zum Antrieb nötigen Momente.
ASOMv7 zeigt die Berechnungsergebnisse ohne und mit Reibung zugleich.