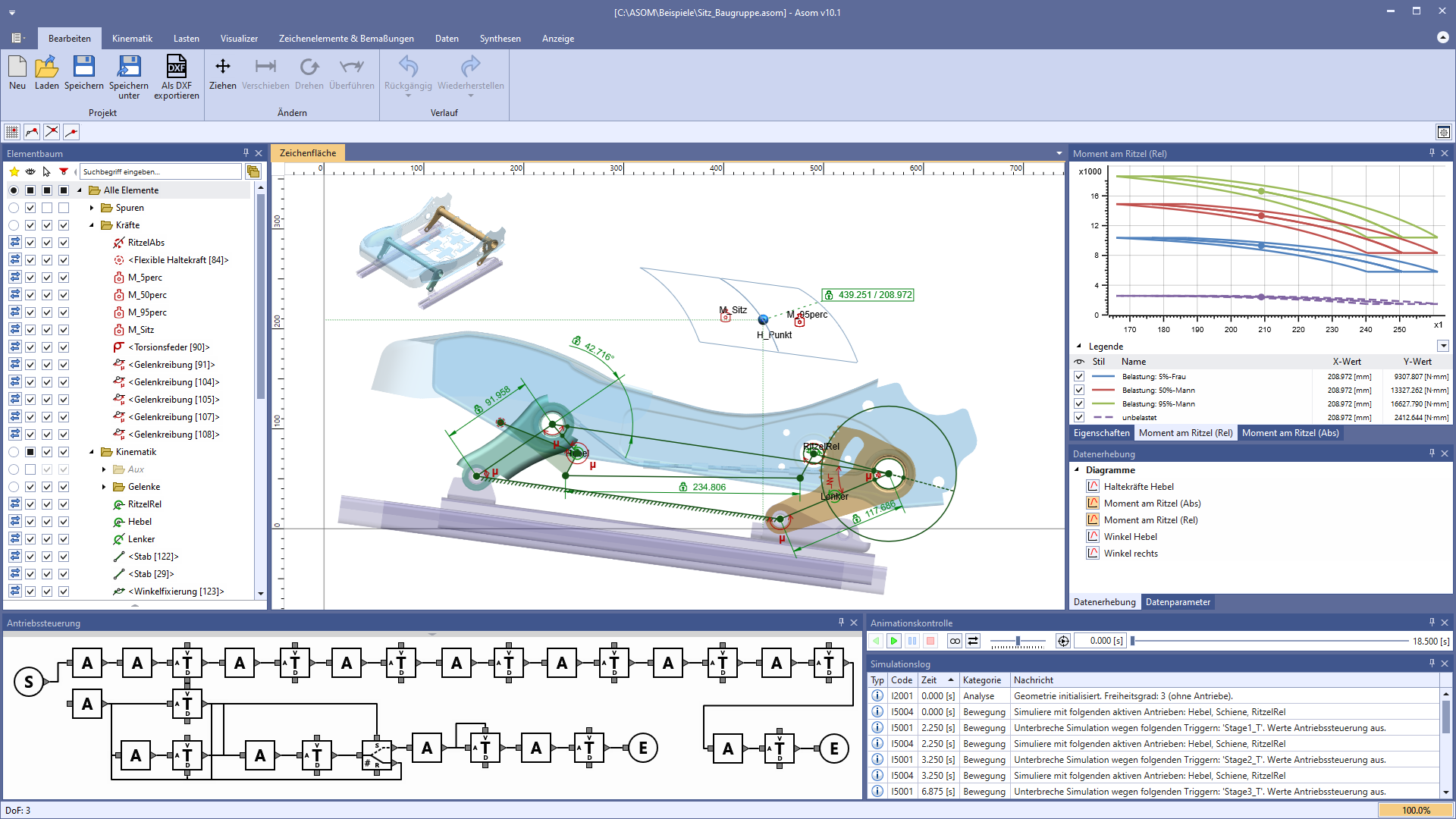


Kinematik eines flächenbündigen Türgriffs
Beispiel für die Berechnung einer Kinematik zu einem flächenbündigen, einziehbaren Türgriff mit separaten Synthesen für die zwei Teil-Kinematiken („Reihenschaltung“ von zwei Synthesen).
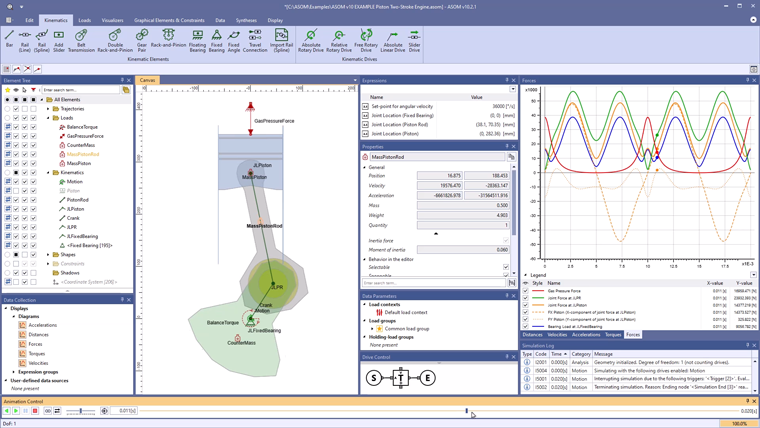
Zylinderkolben eines Zweitaktmotors
Bei diesem Beispiel werden in vereinfachter Weise die Lagerkräfte an einem Zylinderkolben eines Zweitaktmotors in ASOM v10 ermittelt.
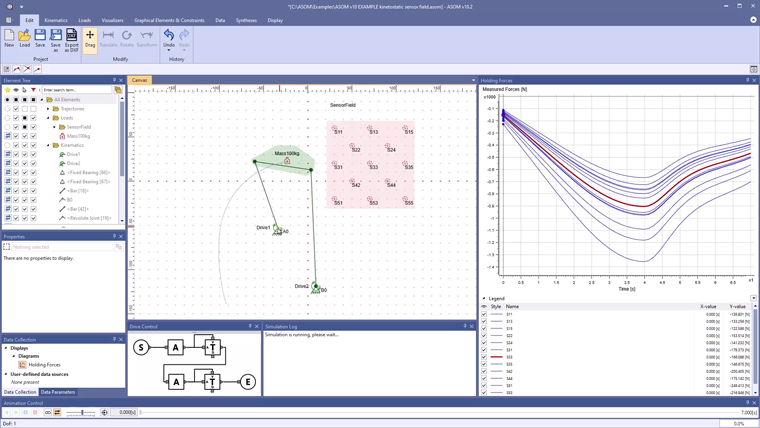
Kinetostatisches Sensorfeld in ASOM v10
In diesem Beispiel einer Viergelenk-Kinematik werden verschiedene Handkraftverläufe in Echtzeit ermittelt. Das Konzept ist natürlich auch auf beliebige andere Mehrgelenksysteme übertragbar. Die kinematische Analyse ist ebenfalls erweiterbar, z.B. um die Ermittlung der entsprechenden Lagerkräfte.
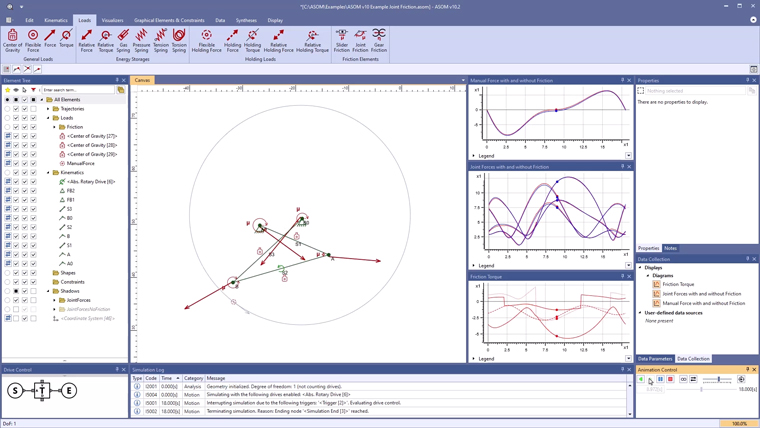
Zapfenreibung an Drehgelenken in kinematische Modelle einbringen
In diesem Beispiel in der Kinematik-Software ASOM v10 wird gezeigt, wie man Zapfenreibung an Drehgelenken in kinematische Modelle einbringen kann. Dabei können mit Hilfe von Zapfenreibungs-Elementen an jedem Drehgelenk ein Zapfendurchmesser und ein Reibkoeffizient verwaltet werden.
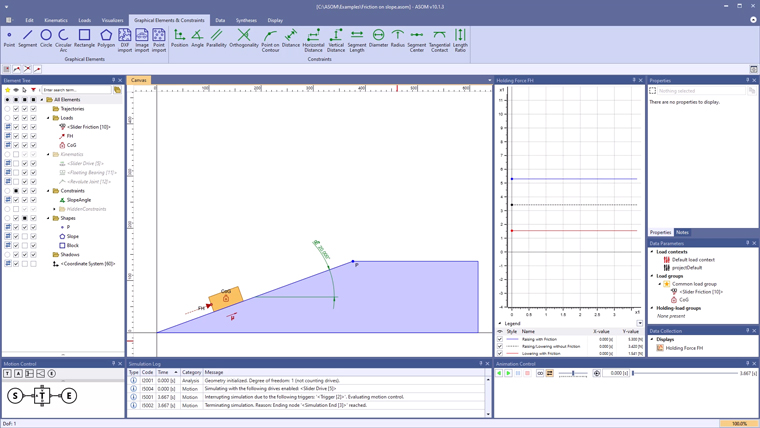
Reibung an schiefer Ebene
In diesem Beispiel in der Kinematik-Software ASOM v10 wird gezeigt, wie man Reibung an Schieber/Schiene-Kontakten in kinematischen Modellen einbringen kann, z.B. zur Realisierung der Reibung eines Blockes auf einer schiefen Ebene.
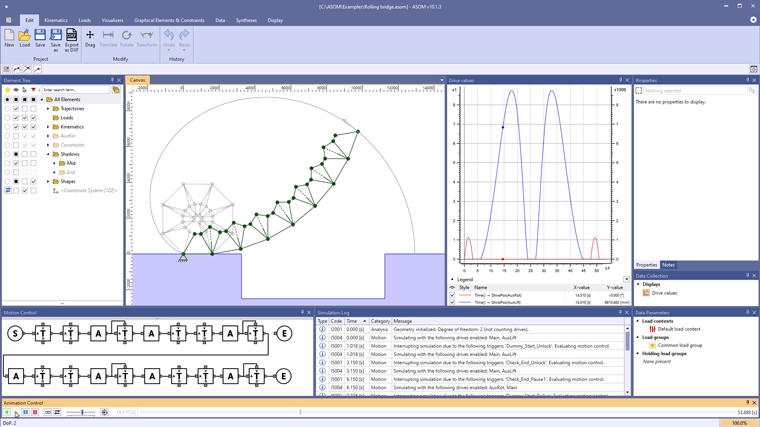
Mehrfache Schatten-Vorschauen am Beispiel einer Rollbrücke
In diesem Beispiel einer Rollbrücke in ASOM v10 wird gezeigt, wie Varianten in der erweiterten Antriebssteuerung und mehrfache Schatten-Vorschauen helfen können, ein Modell besser zu verstehen, ohne nach jeder Änderung die Simulation abzuspielen.
Automobilindustrie
Fußgängerschutz, Heckklappe, Spoiler, Pedalerie, Türgriff, Klappsitz und vieles mehr.

Möbelindustrie
Bürostühle, Schranktüren, Falttürsysteme, Möbelscharniere, Klapptische und vieles mehr.

Sonstiges
Pflegebetten, Rollstühle, Klapptische, Flugzeug-Staufächer, Flaschenzüge und vieles mehr.












